This post describes points that are easily overlooked in the control model.
Control models often overlook the following points. Simulating only with typical values can lead to discrepancies during implementation. Therefore, simulating under conditions that account for tolerances and noise will minimize the need for feedback from implementation. Additionally, in control systems using an RTOS, consider processing cycle tolerances, processing priorities, and differences in processing cycles and events.
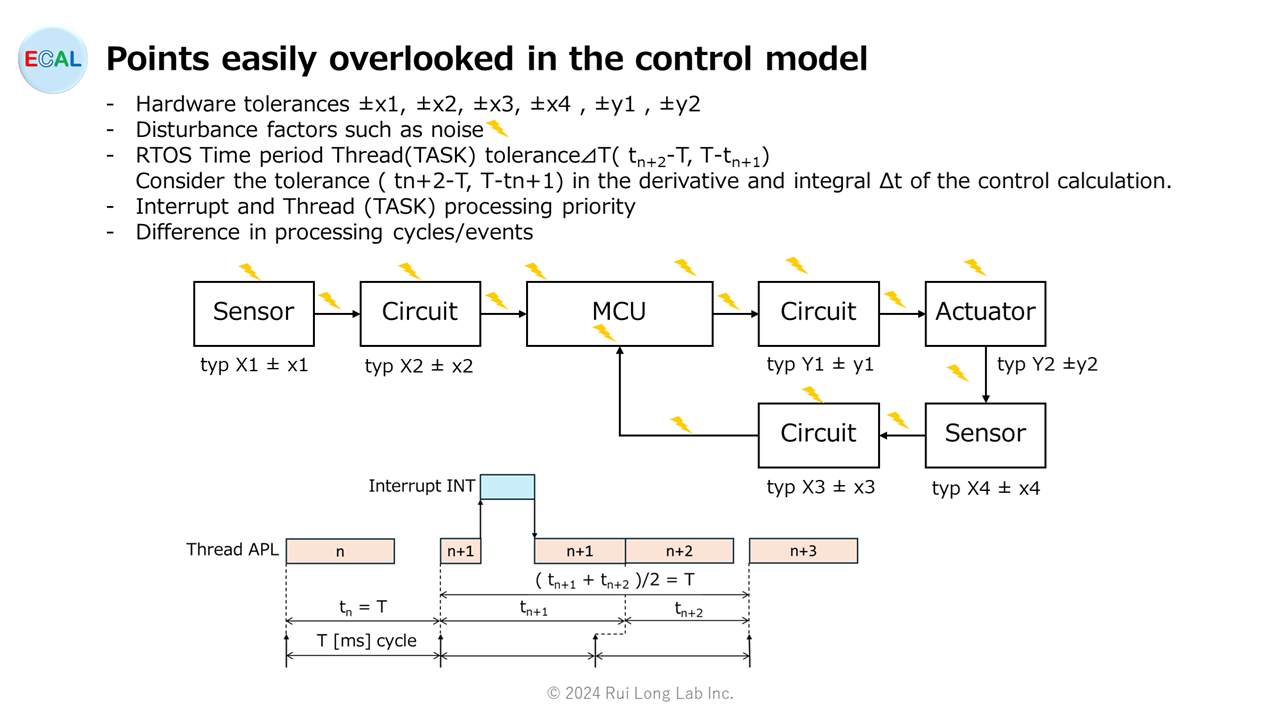
- Hardware tolerances ±x1, ±x2, ±x3, ±x4 , ±y1 , ±y2
- Disturbance factors such as noise
- RTOS Time period Thread(TASK) tolerance⊿T( tn+2-T, T-tn+1)
Consider the tolerance ( tn+2-T, T-tn+1) in the derivative and integral ∆t of the control calculation. - Interrupt and Thread (TASK) processing priority
- -Difference in processing cycles/events