最近、話題のSDV(Software Defined Vehicle)の進展により、ECUのアーキテクチャはドメイン・アーキテクチャからゾーン・アーキテクチャへと移行しつつあります。OSS-ECALは、ECUレイヤーにおけるセンサ、アクチュエータ、外部メモリなどに適用したOSSを提供しています。
ECU間でセンサやアクチュエータが移動する際、それに対応するソフトウェアの移植性が大きな課題となります。OSS-ECALは、この課題を解決し、スムーズな移行を実現します。
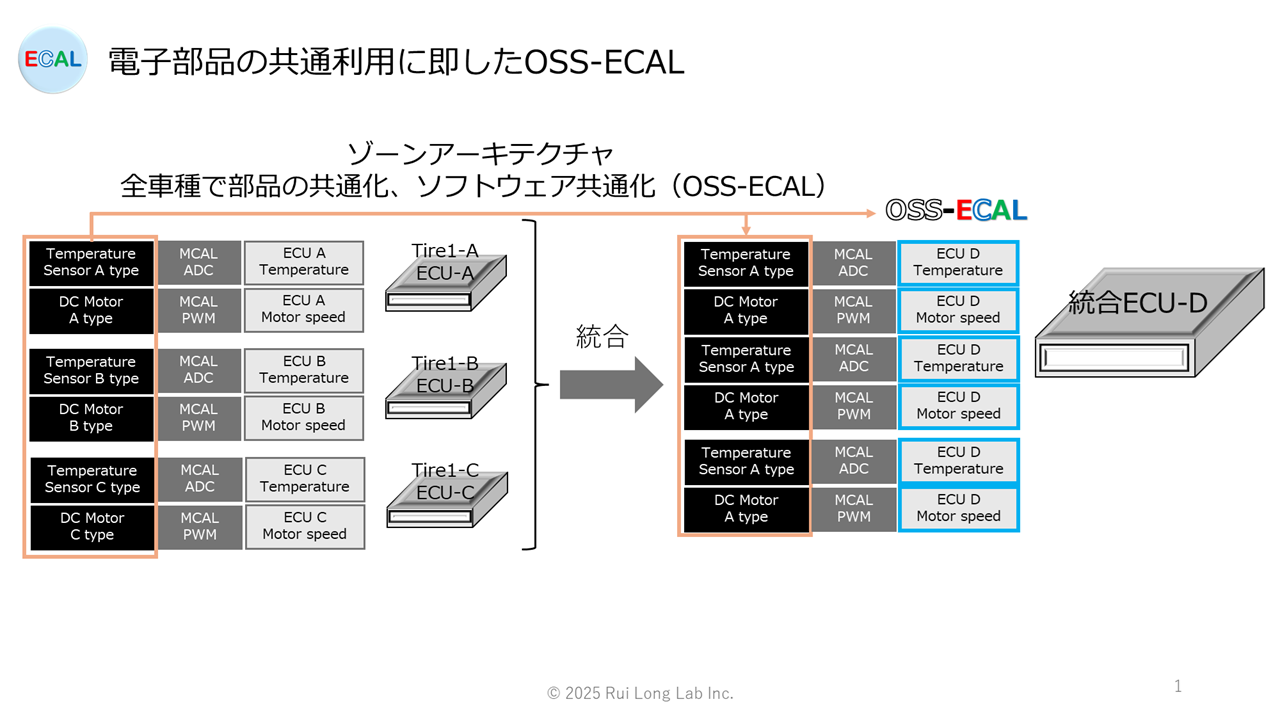
電子部品の共通利用に即したOSS-ECAL
SDVによるゾーンアーキテクチャへの移行に伴い、各 ECU で使用されるセンサーおよびアクチュエーター、外付けメモリを全車種で共通化することで、集中購買による原価低減が期待できると思います。
しかし、センサーやアクチュエーター、外付けメモリのソフトウェアを各 Tier1 メーカーが個別に開発すると、無駄な時間とコストが発生します。そこで、OSS-ECAL を利用することで、ソフトウェアの開発期間の短縮、開発コストの削減、そして共通利用による品質向上が実現できます。
SDV
SDV(ソフトウェア・デファインド・ビークル)に関しては、ECUの書き換えに関する課題だけでなく、ビークルAPIや自動運転、ECUアーキテクチャ、セキュリティ、データセンター、AI、AI向けCPU(GPU、NPU、SoC)、高速メモリなどの課題も挙げられています。本投稿では、過去のSDVに関する投稿も含めて整理しました。なお、私はSDVに関して専門家ではないため、実際のSDVと異なる点があるかもしれませんので、ご了承ください。
SDVの開発フェーズ
SDVは、次のように開発フェーズを分かれると思います。尚、ビークルAPIについては、私では分からないため、未記載とさせていただきました。
| 開発フェーズ | 主要機能 | 概略 | 開発 |
|---|---|---|---|
| Phase 1 OTA機能搭載 | Over The Air(OTA) | – ECUリプロ機能 – リプロセキュリティ | 1-1 OTA 1-2 セキュリティ 標準規格 独自規格 1-3 次世代車載機器および ECUアーキテクチャ定義 1-4 MBDアジャイル開発環境 |
| Phase 2 テレマティクス 機能充実 | User’s Application | – ユーザアプリケーション SNS GAME VOD Payment 生成AI コンシェルジュAI ユーザ個人情報セキュリティ | 2-1 ユーザ個人情報セキュリティ 利用履歴および情報の隠蔽 |
| Phase 3 自動運転および ライドシェア | 自動運転 | – ライドシェアサービス – Payment – 自動運転 – 自動駐車 | 3-1 ビークルAPI 3-2 自動運転AI 3-3 画像認識AI 3-4 車載AI用CPU GPU, NPU, SoC 3-5 車載AI用メモリ |
SDVネットワーク
Phase3のSDVネットワーク構成は、下記のような構成になると思います。
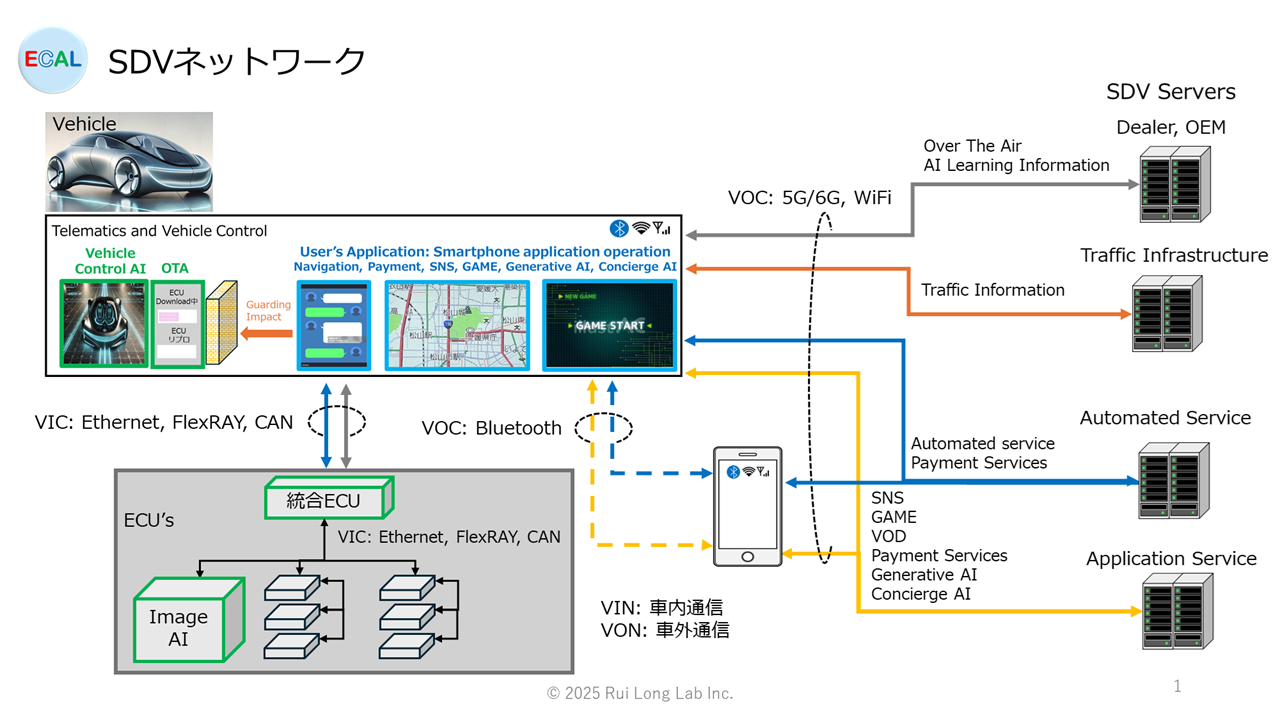
通信プロトコル
| SDV Servers | Telematics | VOC | 5G/6G, Wifi |
| Smartphone, Tablet PC | Telematics | VOC | Bluetooth, USB |
| Telematics | 統合ECU, ECU’s | VIC | Ethernet, FlexRAY, CAN |
| 統合ECU | ECU | VIC | Ethernet, FlexRAY, CAN |
| 統合ECU | Image AI(ADAS) | VIC | Ethernet |
| ECU | ECU | VIC | FlexRAY, CAN |
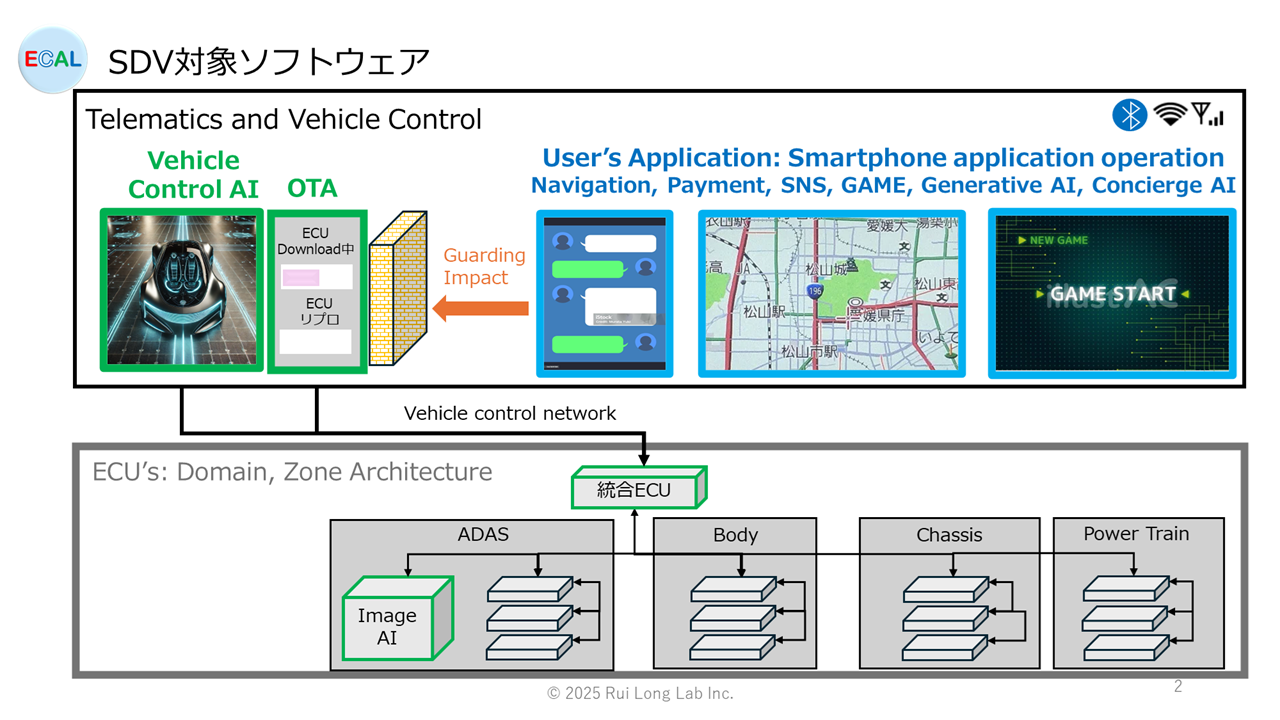
SDV対象ソフトウェア
Phase3のSDV対象となる車載のソフトウェアは、下記のようになると思います。
ここで大切なことは、機能安全を確保しなければなりません。これらのソフトウェアに不具合が生じた場合、重大な事故を引き起こす可能性があります。たとえば、スマートフォンのアプリケーションでも、個別の不具合が電話機能に影響を与えないよう設計されています。
- TelematicsのUser’s Applicationは、車両制御系やECU系のアプリケーションソフトウェアに影響を与えないように分離することが重要です。
- OTAによるアップデートが可能だからといって、車両制御系やECU系ソフトウェアの品質検証を軽視したままリリースしてはなりません。
| SDVソフトウェア | 車載機器: ソフトウェア | ソフトウェア開発・提供元 | OS |
|---|---|---|---|
| OTA(セキュリティ含む) | Telematics: OTA | OEM, Tire1 | Linux, AAOS**, iOS |
| 統合ECU | OEM, Tire1 | Linux, RTOS | |
| ECU | OEM, Tire1 | 各ECU RTOS | |
| ADAS ECU | OEM, Tire1 | RTOS, SoC | |
| User’s Application | Telematics: User’s Application | Application提供事業者 | AAOS**, iOS |
| Telematics: User’s Application(プライベート情報セキュリティ) | OEM, Tire1 | AAOS**, iOS | |
| AI Learning Information(セキュリティ含む) | Telematics: Vehicle Control AI* | OEM, Tire1, AI Service | Linux, SoC |
| 統合ECU | OEM, Tire1 | Linux, RTOS | |
| Image AI* | OEM, Tire1, AI Service | Linux, SoC | |
| Traffic Information and Automated service(セキュリティ含む) | Telematics: Navigation | Navi Service, Automated Service | AAOS**, iOS |
| VICSセンタ | AAOS**, iOS | ||
| Telematics: Vehicle Control AI* | OEM, Tire1, AI Service | Linux, SoC |
* 車載AIには高性能なCPU(GPU、NPU、SoC)と高速なメモリが必要であり、OEMやTier1、Tier2が開発
** AAOS: Android Automotive OS
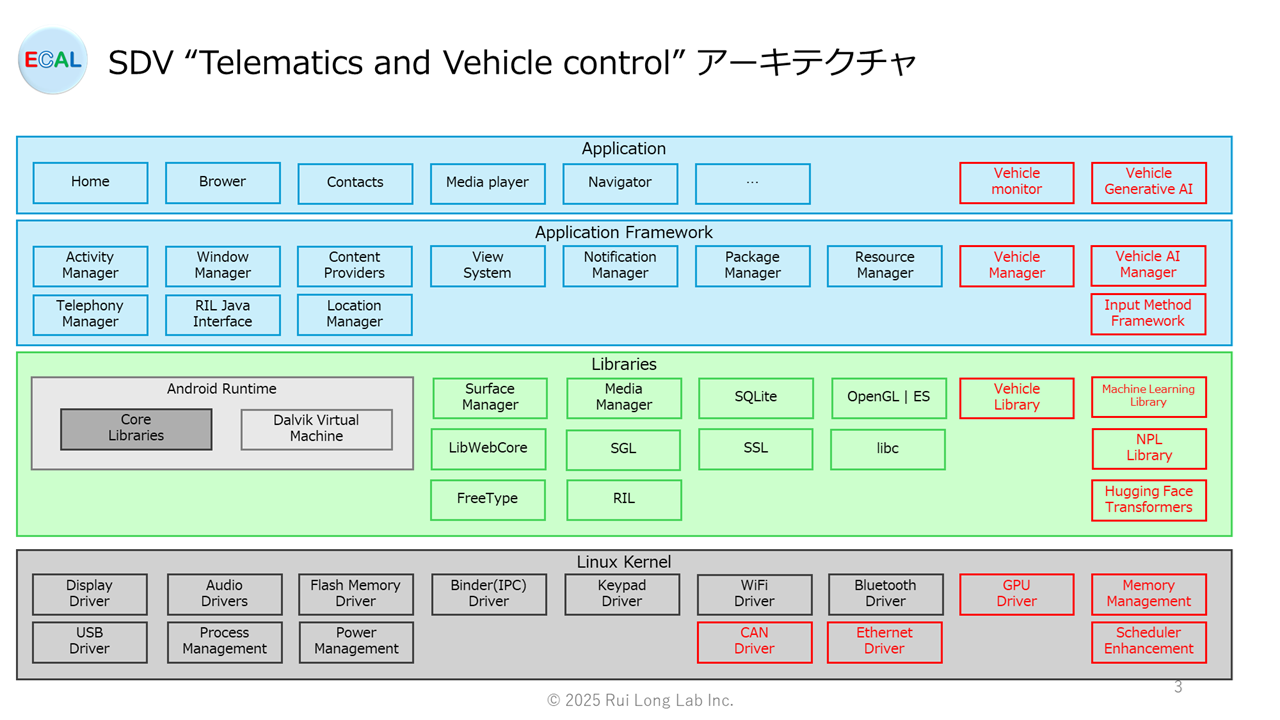
“Telematics and Vehicle control”アーキテクチャ
“Telematics and Vehicle control”のアーキテクチャを、AAOS を参考にして作成しました。赤枠の部分は、専門外で勉強不足なため私のイメージです。
SDV時代に適応するOSS-ECAL
SDVによりECUアーキテクチャの変更が多くなります。OSS-ECALは、センサーやアクチュエータ、外部メモリの移植性が高いOSSです。
ECUシステム
ECU(Electronic Control Unit)ドメイン・アーキテクチャについて、ECUを下表のようにまとめてみました。今後は、複数のECU機能を統合したゾーン・アーキテクチャに変わっていくと思います。
| 系統 | ユニット名 | 略称 | 役割 |
|---|---|---|---|
| パワートレイン系 | エンジンコントロールユニット | ECU (Engine Control Unit) | エンジンの燃料噴射、点火、アイドルなどの制御 |
| インバーターコントローラユニット | ICU (Inverter Control Uint) | EV/HEVのモーター駆動(インバータ/コンバータ)の制御 | |
| トランスミッションコントロールユニット | TCU (Transmission Control Unit) | AT/CVT/DCTの変速などの制御 | |
| バッテリー管理システムユニット | BMS (Battery Management System) | EV/HEVのバッテリー残量や温度の管理 | |
| エネルギーマネジメントシステムユニット | EMS (Energy Management System) | 車両全体のエネルギー最適化の制御 | |
| シャシー系 | 車両運動制御ユニット | VCU (Vehicle Control Unit) | 走行モードや車両挙動を統合制御 |
| 電動パワーステアリングユニット | EPS (Electric Power Steering System) | ハンドル舵角の制御 | |
| 車両安定制御ユニット | ESC (Electronic Stability Control) | 滑りや横転防止のブレーキ制御 | |
| アンチロックブレーキユニット | ABS (Anti-lock Braking System) | タイヤロック防止のブレーキ制御 | |
| 電子制御サスペンションユニット | ECS (Electronic Controlled Suspension) | サスペンション硬さの制御 | |
| 四輪駆動制御ユニット | AWD (All-Wheel Drive) | 4WD車の駆動力配分の制御 | |
| ボディ系 | ボディコントロールユニット | BCM (Body Control Module) | ライト、パワーウィンドウ、ドアロックなどの制御 |
| スマートキーユニット | KOS (Keyless Operation System) | キーレスエントリー制御、エンジンスタート制御 | |
| 空調制御ユニット | HVAC (Heating, Ventilation, and Air Conditioning) | エアコン・ヒーターの温度・風量調整の制御 | |
| ランプ制御ユニット | LCU (Lamp Control Unit) | ヘッドライト・テールランプ・ウインカーの制御 | |
| シート制御ユニット | SCU (Seat Control Unit) | 電動シートの位置調整・ヒーター制御 | |
| ルーフコントロールユニット | RCU (Roof Control Unit) | サンルーフ・コンバーチブルルーフの開閉制御 | |
| ADAS系 | 高度運転支援ユニット | ADAS (Advanced Driver Assistance System) | 衝突回避、車線維持、ACCなどの統合制御 |
| 車線維持支援ユニット | LKA (Lane Keep Assist) | 車線の逸脱防止・ステアリング補正制御 | |
| 自動緊急ブレーキユニット | AEB (Autonomous Emergency Braking) | 衝突回避のための自動ブレーキ制御 | |
| アダプティブクルーズコントロールユニット | ACC (Adaptive Cruise Control) | 先行車との車間距離維持の制御 | |
| 駐車支援ユニット | APA (Automatic Parking Assist) | 自動駐車アシスト制御 | |
| 360度カメラ制御ユニット | AVM (Around View Monitor) | 複数のカメラ映像を合成し、車両周囲の表示 |
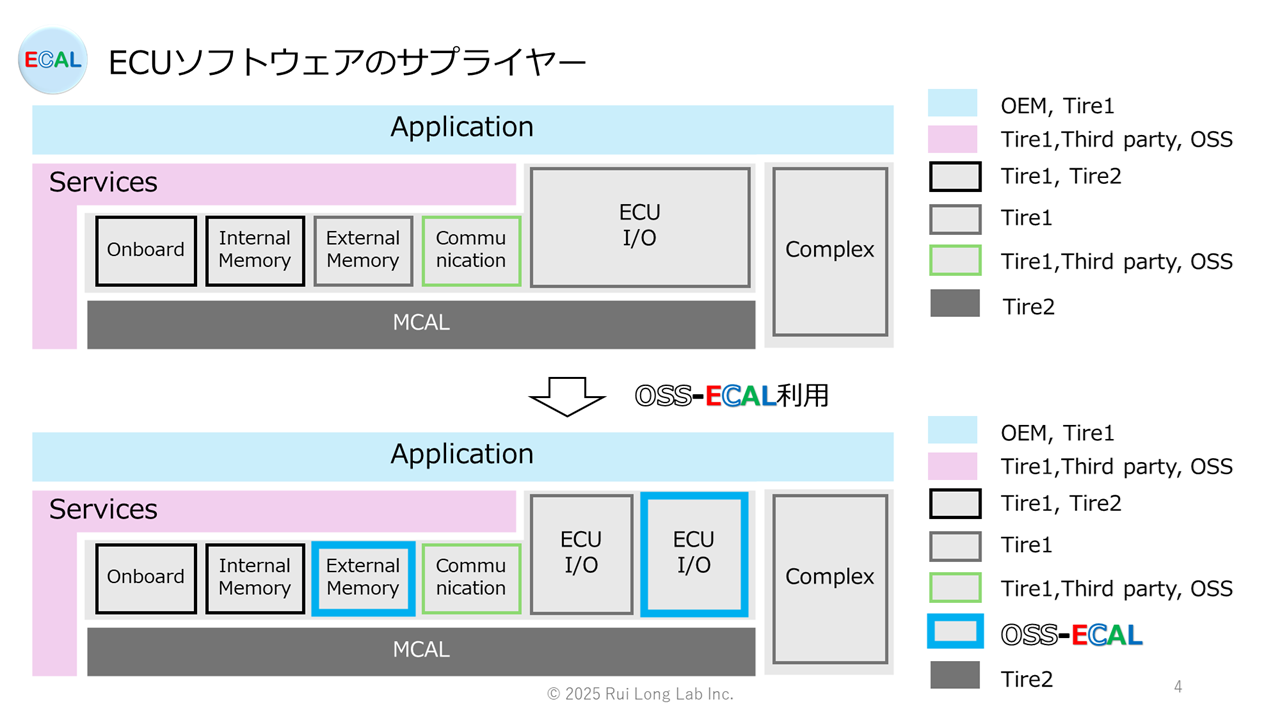
ドメイン・アーキテクチャのECUソフトウェアのサプライヤ
ドメイン・アーキテクチャでのECUソフトウェアのサプライヤは、下図のようになっていると思います。Tire1が提供しているECU I/OやExternal EEPROMは、OSS-ECALを用いることで効率改善に繋がります。
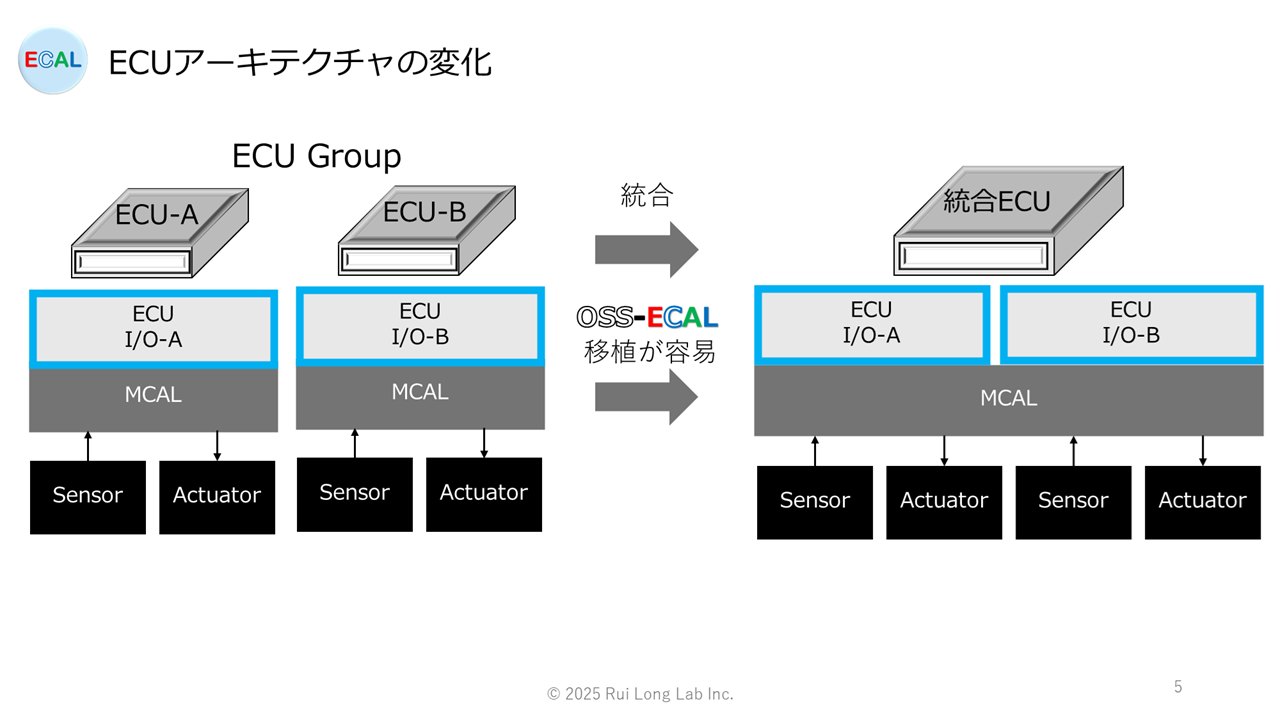
センサやアクチュエータの移動
基本的にセンサやアクチュエータ、外部メモリなどは、ドメイン・アーキテクチャであってもゾーン・アーキテクチャであっても、配置するECUが変わるだけです。よって、センサやアクチュエータ、外部メモリのソフトウェア・コンポーネントは、移植性が高いことが重要となります。OSS-ECALは、移植性を重視したOSSです。
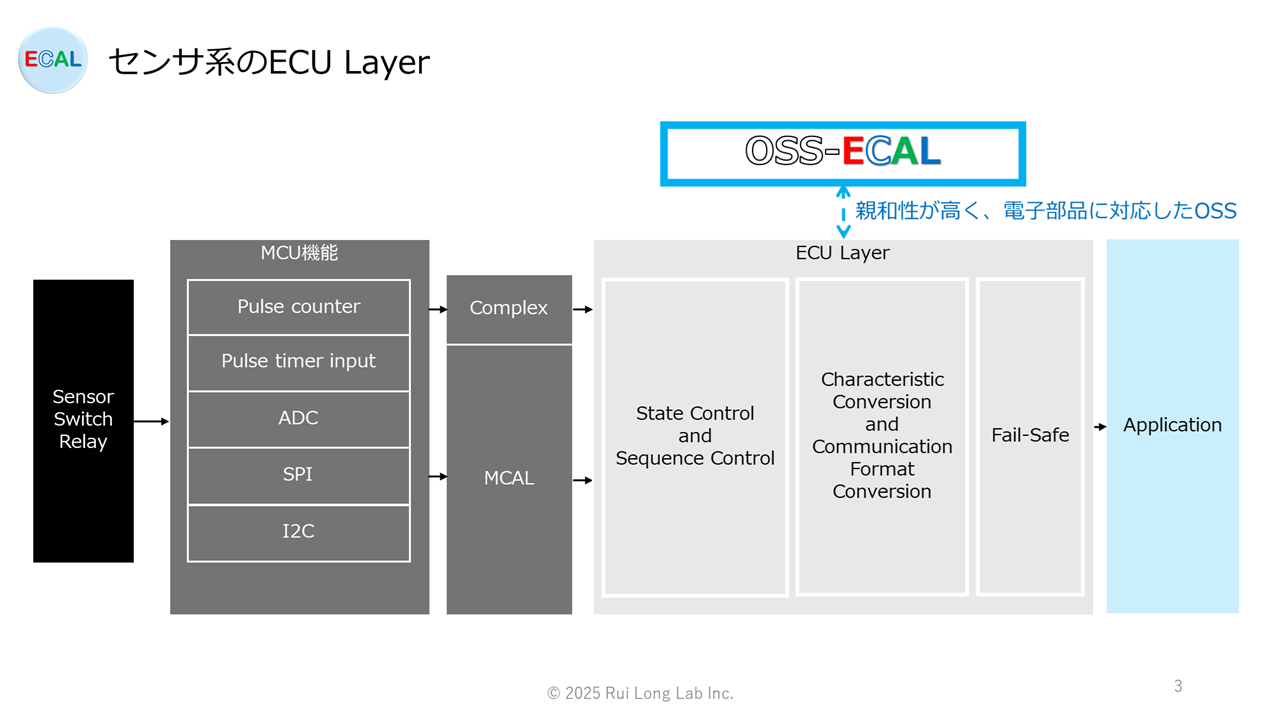
センサ系ECU Layer
センサは、下図のようなECU Layerにて構成されています。センサ系ECUレイヤのOSS-ECALは、状態遷移やシーケンス制御、物理値変換、SPIやI2Cの通信、フェールセーフをOSSとしてコンポーネントし、機能性および信頼性、保守性を実現しています。
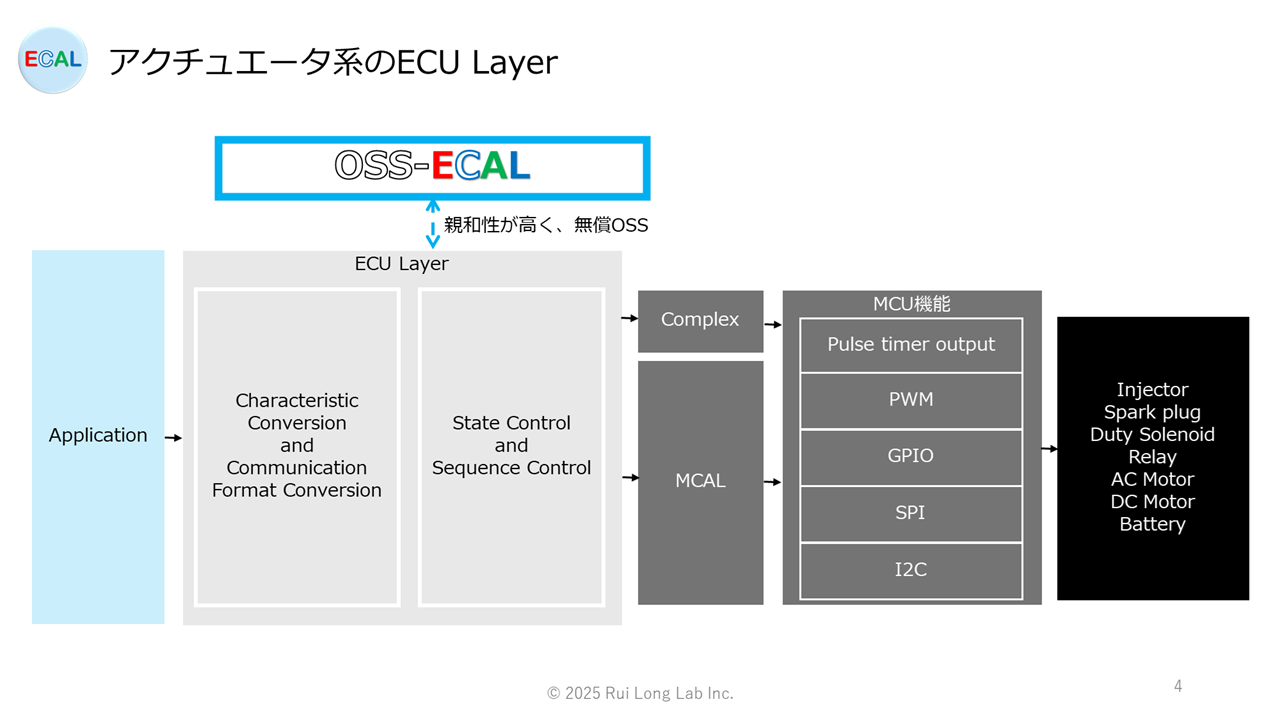
アクチュエータ系ECU Layer
アクチュエータは、下図のようなECU Layerにて構成されています。アクチュエータ系ECUレイヤのOSS-ECALは、状態遷移やシーケンス制御、物理値変換、SPIやI2Cの通信をOSSとしてコンポーネントし、機能性および信頼性、保守性を実現しています。
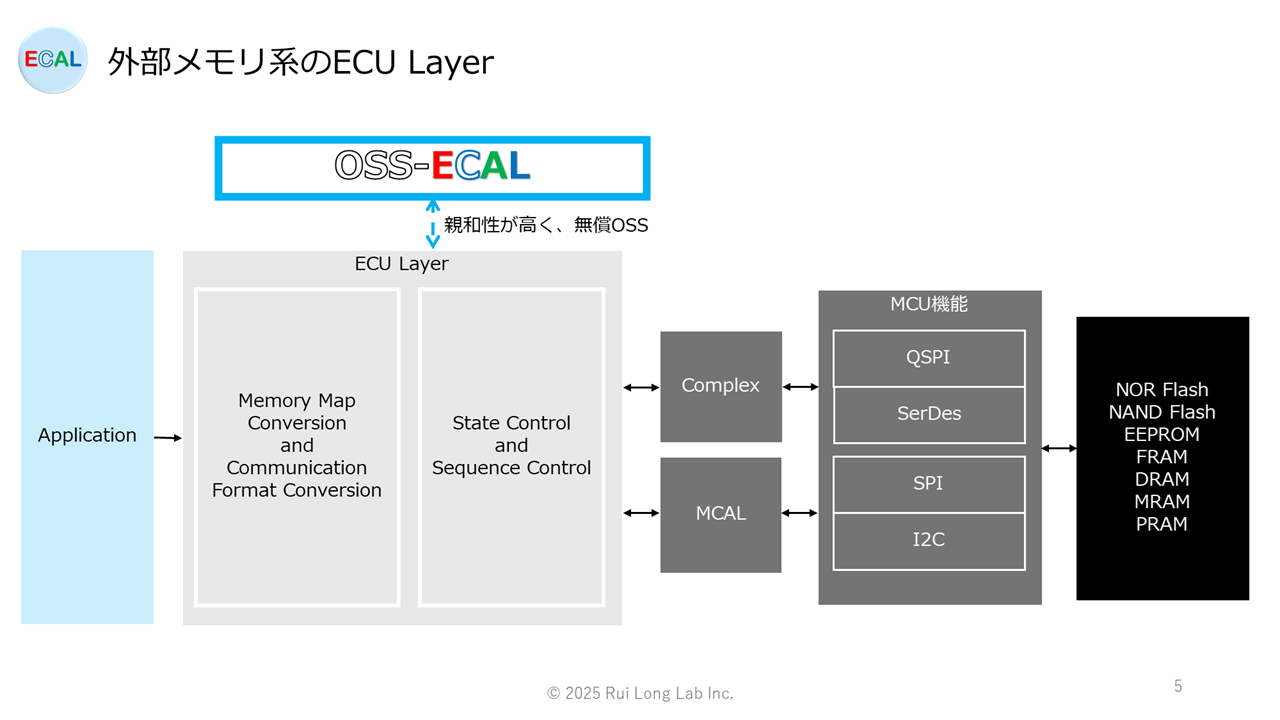
外部メモリ系ECU Layer
外部メモリは、下図のようなECU Layerにて構成されています。外部メモリ系ECUレイヤのOSS-ECALは、状態遷移やシーケンス制御、メモリマップ変換、SPIやI2Cの通信をOSSとしてコンポーネントし、機能性および信頼性、保守性を実現しています。
電子部品の標準API化
OSS-ECALのAPIは、部品型番を意識しています。しかし、#defineにてAPIを標準化できます。
例)温度センサABC1のアプリケーション登録
/* Temperature ABC1 read function*/
etSTS oABC1_READ( float32* );
#define TEMPERATURE_READ oABC1_READ
etSTS TEMPERATURE_READ( float32* rlt )温度センサABC1を温度センサABC2に変更する場合のアプリケーションの変更箇所。尚、OSS-ECALファイルは、ABC2のファイルに入れ替えてください。
/* Temperature ABC2 read function*/
etSTS oABC2_READ( float32* );
#define TEMPERATURE_READ oABC2_READ
etSTS TEMPERATURE_READ( float32* rlt )今後の車載対応OSS-ECAL
これから車載対応OSS-ECALは、次の対応を行っていき、自動車業界の発展に寄与したいと思っています。
- 車載用電子部品の拡充
- 各MCU SDKツールのOSS-ECALアドオン開発
- Eclipse SDVなどのSDVツールのOSS-ECALアドオン開発
- OSS-ECALのSlimulinkモデル開発
OEMやTire1の皆様は、必要なOSS-ECALがございましたら電子部品メーカ様や電子部品商社様にご相談頂きますよう、お願いいたします。