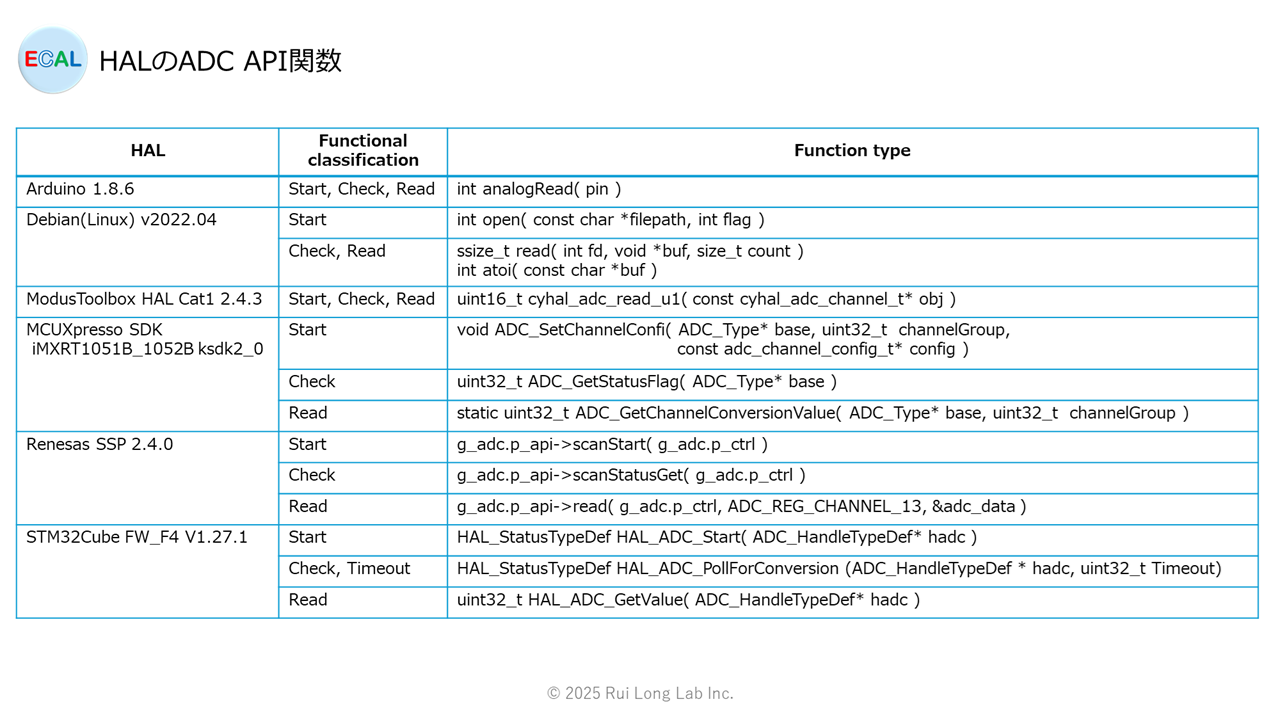
この投稿では、各HALでADCの値を読み取るために使用するAPI関数を紹介します。
ADCの値を読み込むためのAPI関数を次のように分類しました。
| 分類略称 | 概要 |
|---|---|
| Start | AD変換スタートするAPI関数 |
| Check | AD変換ステータスをチェックするAPI関数 |
| Read | AD変換値を読み込むAPI関数 |
| Start, Check, Read | AD変換スタートし、AD変換終了まで待機し、AD変換値を読み込むAPI関数 |
| Check, Timeout | Timeout計測を行い、AD変換終了を待機するAPI関数 |
今回紹介するHALは、次のHALです。
- Arduino 1.8.6
- Debian(Linux) v2022.04
- ModusToolbox HAL Cat1 2.4.3
- MCUXpresso SDK iMXRT1051B_1052B ksdk2_0
- Renesas SSP 2.4.0
- STM32Cube FW_F4 V1.27.1
HAL API関数には、簡単に使用できる関数やリアルタイム性の高い関数、ADC故障による無限ループ対策のタイムアウト機能を備えた関数など、さまざまな特徴があります。皆様の製品に合ったHALを選んでください。