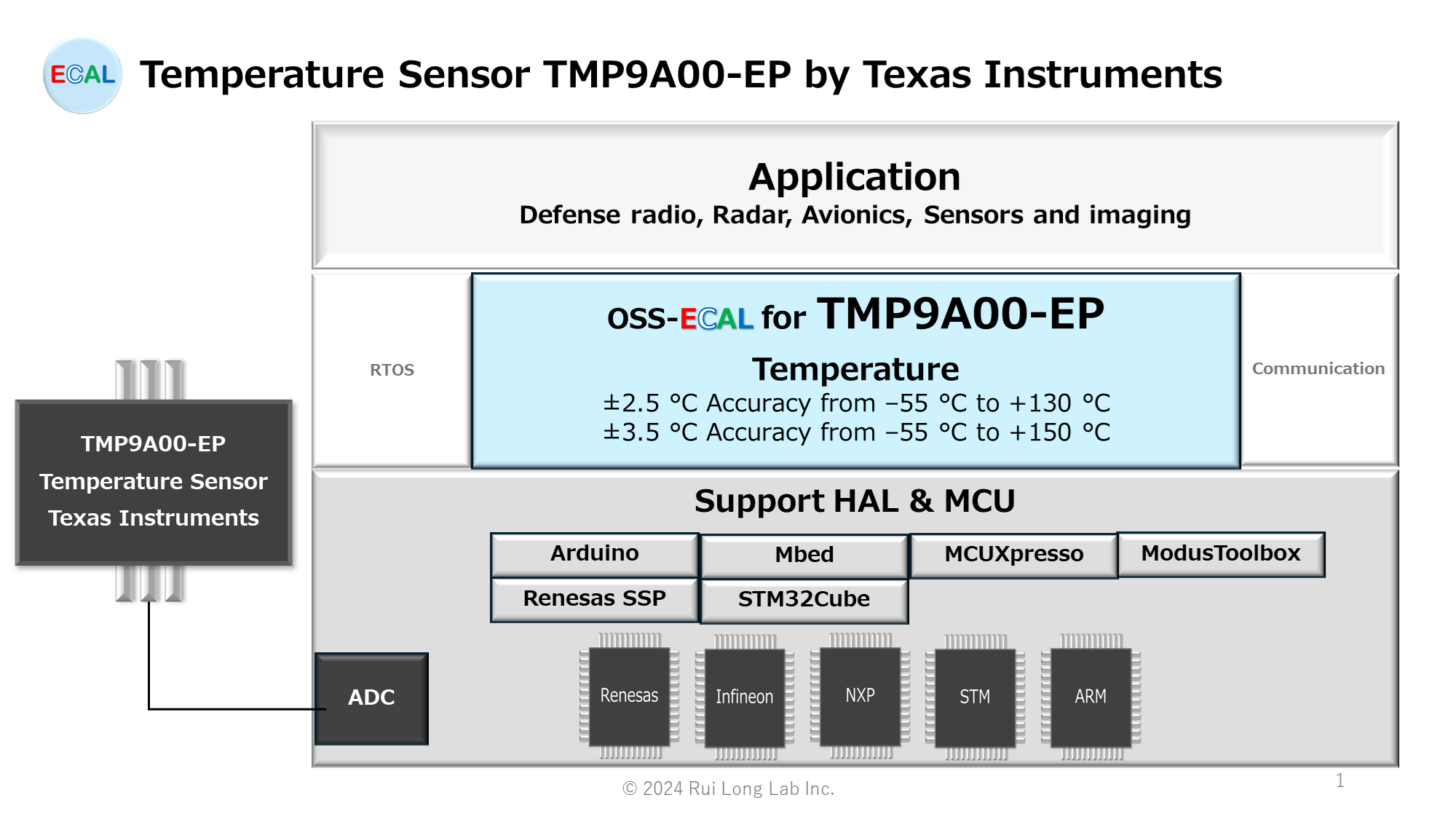
TMP9A00-EPの概要と、TMP9A00-EP用OSS-ECALの提供についてご紹介いたします。TMP9A00-EPは、Texas Instruments製の温度センサ IC(-55℃~+130℃にわたる ±2.5℃の精度、-55℃~+150℃にわたる ±3.5℃の精度)です。
MCUインタフェース:ADC
ご注意:実際の設計などの前には、必ず最新版Datasheetをご参照くださいますようお願いいたします。
TMP9A00-EP
概要
TMP9A00-EP デバイスは CMOS の高精度アナログ出力温度センサで、小さな 5 ピン SC70 パッケージで供給されます。TMP9A00-EP は -55℃~150℃、電源電圧 1.8V~5.5V で動作し、消費電流は 4µA です。15℃~150℃の温度範囲では、最低 1.8V で動作できます。線形伝達関数のスロープは -11.77mV/℃ (標準値) で、出力電圧は 0℃で 1.8639V (標準値) です。TMP9A00-EP の精度は、–55℃~130℃で ±2.5℃、130℃~150℃で ±3.5℃です。
TMP9A00-EP の消費電流は 4μA (最大値) であり、デバイスの自己発熱は 0.01℃未満に制限されます。V+ が 0.5V 未満の場合、デバイスはシャットダウン・モードになり、消費電流は 20nA (標準値) 未満です。
TMP9A00-EP は 5 ピン SC70 パッケージで供給され、必要な全体の基板面積を減らすことができます。
特徴
- -55℃~+130℃にわたる ±2.5℃の精度
- -55℃~+150℃にわたる ±3.5℃の精度
- 電源電圧範囲:1.8V~5.5V
- 低消費電力:4μA (最大値)
- 超小型パッケージ:SC70
- 防衛、航空宇宙、および医療アプリケーションをサポート
– 管理されたベースライン
– 単一のアセンブリ / テスト施設
– 単一の製造施設
– 長い製品ライフ・サイクル
– 製品変更通知期間の延長
– 製品のトレーサビリティ
用途
- 防衛用無線
- レーダー
- 航空
- センサおよび画像処理装置
OSS-ECAL仕様
API関数
etSTS oTMP9A00_START(void)
oTMP9A00_START関数は、TMP9A00-EPのAD変換を開始するAPI関数です。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_HAL_ADC | HAL ADCエラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (STM32F4) | ||
| eSTS_ERR_ADC_OBJECT | AD変換オブジェクト選択エラー |
etSTS oTMP9A00_READ( float32* rlt )
oTMP9A00_READ関数は、TMP9A00-EPのAD変換の終了を確認し、AD変換値を読み込み、そのAD変換値を温度に特性変換して、その温度をrltに保存するAPI関数です。
AD変換値から温度変換式
電圧値=(AD変換値×VDD)/(2AD bit)
温度=((電圧値-電圧オフセット値)/ゲイン係数)+温度オフセット値 (Min, Max Limit)
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_MIN | 最小温度エラー(rltは最小温度) | ||
| eSTS_ERR_MAX | 最大温度エラー(rltは最大温度) | ||
| eSTS_ERR_HAL_ADC | HAL ADCエラー (STM32F4 Timeout) | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_ADC_OBJECT | AD変換オブジェクト選択エラー | ||
| 引数 OUT | float32* rlt | 温度 -55.0 to +130.0 [°C] |
etSTS oTMP9A00_START_READ( float32* rlt )
oTMP9A00_START_READ関数は、TMP9A00-EPのAD変換を開始し、AD変換の終了を待ち、AD変換値を読み込み、そのAD変換値を温度に特性変換して、その温度をrltに保存するAPI関数です。
AD変換値から温度変換式
電圧値=(AD変換値×VDD)/(2AD bit)
温度=((電圧値-電圧オフセット値)/ゲイン係数)+温度オフセット値 (Min, Max Limit)
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_MIN | 最小温度エラー(rltは最小温度) | ||
| eSTS_ERR_MAX | 最大温度エラー(rltは最大温度) | ||
| eSTS_ERR_HAL_ADC | HAL ADCエラー (STM32F4 Timeout) | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (STM32F4) | ||
| eSTS_ERR_ADC_OBJECT | AD変換オブジェクト選択エラー | ||
| 引数 OUT | float32* rlt | 温度 -55.0 to +130.0 [°C] |
HALサポート
OSS-ECALのHAL対応は、次の通りです。(順次拡大中)尚、同じHALであってもVerやMCU、開発環境が異なると動作が合わない場合がありますので、ご注意ください。
| メーカ | SDK/IDE ツール | HAL名称 | Ver | HALNAME | Support |
|---|---|---|---|---|---|
| Arduino | Arduino IDE | Arduino | 1.8.6 | ARDUINO | X |
| Arm | Keil MDK v6 | Mbed OS | 6.17.0 | MBED | X |
| Debian | – | GNU/Linux | 10.3 | Linux | – |
| Infineon | ModusToolbox | mtb-hal-cat1 | 2.4.3 | ModusToolbox | X |
| NXP | MCUXpresso SDK | SDK_2.x_EVKB-IMXRT1050 | 2.16 | iMXRT1051B1052B | X |
| Renesas | Synergy Software Package | HAL | 2.6.0 | SSP | X |
| STMicroelectronics | STM32Cube | STM32CubeF4 | V1.28.1 | STM32F4 | X |
HAL別関数対応表
| HALNAME | oTMP9A00_START | oTMP9A00_READ | oTMP9A00_START_READ |
|---|---|---|---|
| ARDUINO | – | – | X |
| MBED | – | – | X |
| Linux | – | – | – |
| ModusToolbox | – | – | X |
| iMXRT1051B1052B | X | X | X |
| SSP | X | X | X |
| STM32F4 | X | X Time-out time: HAL_MAX_DELAY | X Time-out time: HAL_MAX_DELAY |
開発環境
OSS-ECAL開発時のMCUおよび開発環境は、次の通りです。
| HALNAME | メーカ | 開発ボード | MCU | IDE |
|---|---|---|---|---|
| ARDUINO | Arduino | 1.Mega 2560 Rev3 2.Arduino Pro Mini 3.3V | ATmega2560 ATmega328P | Arduino IDE 2.3.3 |
| MBED | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | Arm Keil Studio Cloud |
| Linux | BeagleBoard | BeagleBone Black | TI AM335x | – |
| ModusToolbox | Infineon | CY8CPROTO-063-BLE PSoC 6 BLE Prototyping Kit | CYBLE-416045-02 | ModusToolbox |
| iMXRT1051B1052B | NXP | IMXRT1050-EVKB | i.MX RT1050 | MCUXpresso IDE |
| SSP | Renesas | S7G2 SK | R7FS7G27H3A01CFC | e² studio for Renesas Synergy |
| STM32F4 | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | STM32CubeIDE |
File構成
| フォルダ* | ファイル | 概要 |
|---|---|---|
| TMP9A00_HALNAME_VERSION/sample | sample.c (.cpp) | サンプル・アプリケーション・プログラム |
| sample.h | サンプル・アプリケーション・ヘッダ | |
| TMP9A00_HALNAME_VERSION | oTMP9A00.c (.cpp) | TMP9A00-EP用OSS-ECALプログラム |
| oTMP9A00.h | TMP9A00-EP用OSS-ECALヘッダ | |
| TMP9A00_ARDUINO.ino | Arduino用サンプル・アプリケーション・プログラム | |
| oss_ecal.h | OSS-ECAL 共通ヘッダ (Ver 01.00.00以降) | |
| user_setting.c (.cpp) | ユーザ設定定数・テーブル | |
| user_setting.h | ユーザ設定ヘッダ | |
| readme.md | Readme | |
| OSS-ECAL Terms of Use.txt | OSS-ECAL利用条件 |
* HALNAMEはHAL対応表を参照してください。
OSS-ECAL ダウンロード
OSS-ECALのダウンロードは、英語版OSS-ECALサイトからお願いいたします。なお、ダウンロードを行う際は、英語版OSS-ECALサイトにログインしてから操作してください。
組込み方法
ユーザプログラムに複数のOSS-ECAL(同じMCU機能の電子部品)を組み込む方法
ユーザプログラムに複数のOSS-ECAL(異なるMCU機能の電子部品)を組み込む方法
注意事項
サンプル版OSS-ECALは、優先順位の異なるThread(Task)や割込みで用いることを前提としていません。下記の例のような使い方はしないでください。
例)同じADCグループに各センサーが割り当てられ、優先順位が異なる処理でOSS-ECAL APIを実行すると、正しい値を取得できない場合があります。
ADC Gr0 Ch0 温度センサ AD22100A 100ms周期 Thread(優先順位低)で温度取込み
ADC Gr0 Ch1 圧力センサ MPX5999D イベント割込み(優先順位高)で圧力取込み