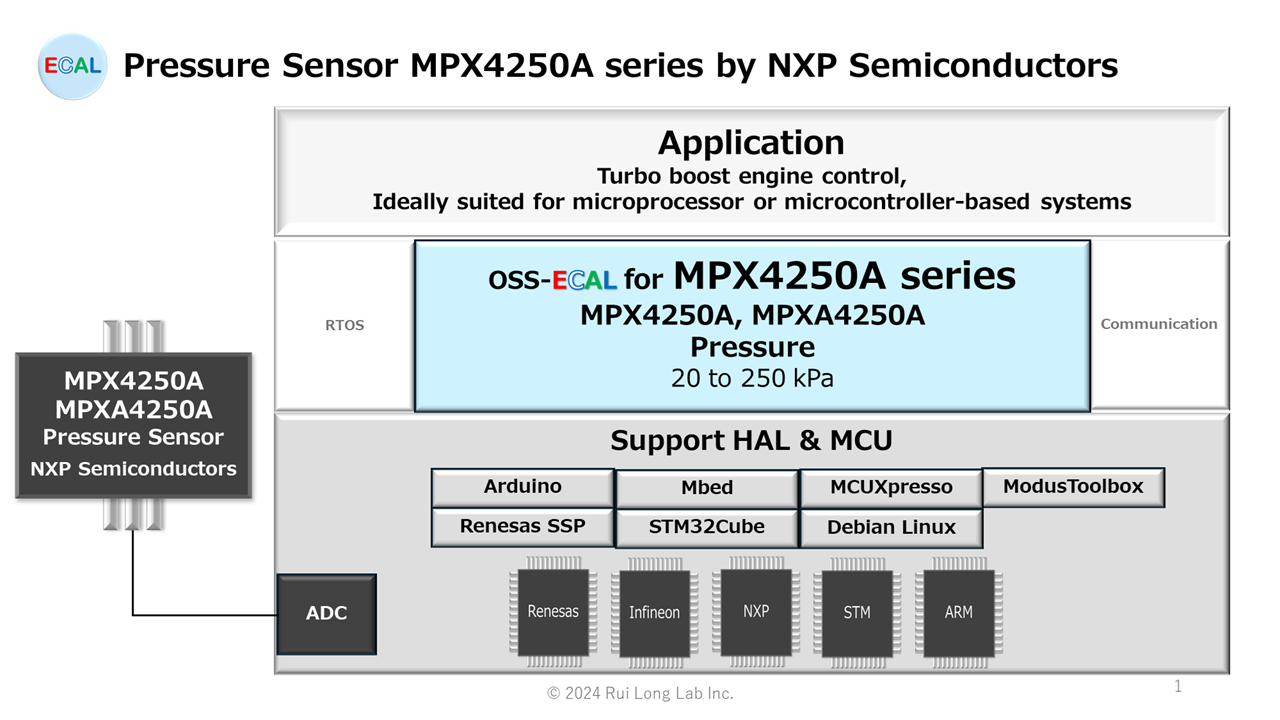
MPX4250Aシリーズ(MPX4250A, MPXA4250A)の概要と、MPX4250Aシリーズ用OSS-ECALの提供についてご紹介いたします。MPX4250Aシリーズは、NXP Semiconductors製の圧力センサ IC(20 ~ 250 kPa)です。
MCUインタフェース:ADC
ご注意:このリソースの元の言語は英語です。 翻訳は概要を便宜的に提供するもので、機械翻訳を使用していることがあり、私たちは翻訳の正確性および妥当性につきましては一切保証いたしません。 また、実際の設計などの前には、必ず最新版Datasheetをご参照くださいますようお願いいたします。
MPX4250Aシリーズ(MPX4250A, MPXA4250A)
概要
エンジン制御用MPX4250A/MPXA4250Aマニホールド絶対圧(MAP)センサは、インテーク・マニホールド内の絶対空気圧を検知するように設計されています。この測定値を使用して、各シリンダに必要な燃料量を計算できます。MPX4250A/MPXA4250Aピエゾ抵抗型トランスデューサは、特にA/D入力を備えたマイクロコントローラまたはマイクロプロセッサを使用する幅広いアプリケーション向けに設計された最先端のモノリシックシリコン圧力センサです。この変換器は、高度なマイクロマシニング技術、薄膜メタライゼーション、バイポーラ処理を組み合わせ、印加圧力に比例した正確で高レベルのアナログ出力信号を提供します。小型フォームファクタとオンチップ集積による高い信頼性により、NXPセンサは自動車システムエンジニアにとって論理的かつ経済的な選択肢となります。
特徴
- 最大誤差1.5(0 °C~85 °C)
- エンジン制御システムのインテーク・マニホールド絶対圧検知用に特別設計
- 特許取得済みのシリコン製せん断応力ひずみゲージ
- 温度補償 -40 °C ~ +125 °C
- 既存のハイブリッド・モジュールに比べ、重量と体積の削減を実現
- 高耐久エポキシユニボディ素子または熱可塑性小型外形表面実装パッケージ
- 自動車以外の用途に最適
- 3種類のスモール・アウトライン・パッケージと2種類のユニボディ・パッケージがある
用途
- ターボ・エンジン制御
- マイクロプロセッサーまたはマイクロコントローラーベースのシステムに最適
OSS-ECAL仕様
API関数
OSS-ECALのAPI関数は、基本的に定周期Thread(TASK)から関数コールされることを前提としています。
etSTS oMPX4250A_START(void)
oMPX4250A_START関数は、MPX4250AシリーズのAD変換を開始するAPI関数です。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_HAL_ADC | HAL ADCエラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (STM32F4) | ||
| eSTS_ERR_ADC_OBJECT | AD変換オブジェクト選択エラー |
etSTS oMPX4250A_READ( float32* rlt )
oMPX4250A_READ関数は、MPX4250AシリーズのAD変換の終了を確認し、AD変換値を読み込み、そのAD変換値を圧力に特性変換して、その圧力をrltに保存するAPI関数です。
AD変換値から圧力変換式
電圧値=(AD変換値×VDD)/(2AD bit)
圧力=((電圧値-電圧オフセット値)/ゲイン係数)+圧力オフセット値 (Min, Max Limit)
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_MIN | 最小圧力エラー(rltは最小圧力) | ||
| eSTS_ERR_MAX | 最大圧力エラー(rltは最大圧力) | ||
| eSTS_ERR_HAL_ADC | HAL ADCエラー (STM32F4 Timeout) | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_ADC_OBJECT | AD変換オブジェクト選択エラー | ||
| 引数 OUT | float32* rlt | 圧力 20.0 to 250.0 [kPa] |
etSTS oMPX4250A_START_READ( float32* rlt )
oMPX4250A_START_READ関数は、MPX4250AシリーズのAD変換を開始し、AD変換の終了を待ち、AD変換値を読み込み、そのAD変換値を圧力に特性変換して、その圧力をrltに保存するAPI関数です。
AD変換値から圧力変換式
電圧値=(AD変換値×VDD)/(2AD bit)
圧力=((電圧値-電圧オフセット値)/ゲイン係数)+圧力オフセット値 (Min, Max Limit)
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_MIN | 最小圧力エラー(rltは最小圧力) | ||
| eSTS_ERR_MAX | 最大圧力エラー(rltは最大圧力) | ||
| eSTS_ERR_HAL_ADC | HAL ADCエラー (STM32F4 Timeout) | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (STM32F4) | ||
| eSTS_ERR_ADC_OBJECT | AD変換オブジェクト選択エラー | ||
| 引数 OUT | float32* rlt | 圧力 20.0 to 250.0 [kPa] |
HALサポート
OSS-ECALのHAL対応は、次の通りです。(順次拡大中)尚、同じHALであってもVerやMCU、開発環境が異なると動作が合わない場合がありますので、ご注意ください。
| メーカ | SDK/IDE ツール | HAL名称 | Ver | HALNAME | Support |
|---|---|---|---|---|---|
| Arduino | Arduino IDE | Arduino | 1.8.6 | ARDUINO | X |
| Arm | Keil MDK v6 | Mbed OS | 6.17.0 | MBED | X |
| Debian | – | GNU/Linux | 10.3 | Linux | X |
| Infineon | ModusToolbox | mtb-hal-cat1 | 2.4.3 | ModusToolbox | X |
| NXP | MCUXpresso SDK | SDK_2.x_EVKB-IMXRT1050 | 2.16 | iMXRT1051B1052B | X |
| Renesas | Synergy Software Package | HAL | 2.6.0 | SSP | X |
| STMicroelectronics | STM32Cube | STM32CubeF4 | V1.28.1 | STM32F4 | X |
HAL別関数対応表
| HALNAME | oMPX4250A_START | oMPX4250A_READ | oMPX4250A_START_READ |
|---|---|---|---|
| ARDUINO | – | – | X |
| MBED | – | – | X |
| Linux | – | – | X |
| ModusToolbox | – | – | X |
| iMXRT1051B1052B | X | X | X |
| SSP | X | X | X |
| STM32F4 | X | X Time-out time: HAL_MAX_DELAY | X Time-out time: HAL_MAX_DELAY |
開発環境
OSS-ECAL開発時のMCUおよび開発環境は、次の通りです。
| HALNAME | メーカ | 開発ボード | MCU | IDE |
|---|---|---|---|---|
| ARDUINO | Arduino | 1.Mega 2560 Rev3 2.Arduino Pro Mini 3.3V | ATmega2560 ATmega328P | Arduino IDE 2.3.3 |
| MBED | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | Arm Keil Studio Cloud |
| Linux | BeagleBoard | BeagleBone Black | TI AM335x | – |
| ModusToolbox | Infineon | CY8CPROTO-063-BLE PSoC 6 BLE Prototyping Kit | CYBLE-416045-02 | ModusToolbox |
| iMXRT1051B1052B | NXP | IMXRT1050-EVKB | i.MX RT1050 | MCUXpresso IDE |
| SSP | Renesas | S7G2 SK | R7FS7G27H3A01CFC | e² studio for Renesas Synergy |
| STM32F4 | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | STM32CubeIDE |
File構成
| フォルダ* | ファイル | 概要 |
|---|---|---|
| MPX4250A_HALNAME_VERSION/sample | sample.c (.cpp) | サンプル・アプリケーション・プログラム |
| sample.h | サンプル・アプリケーション・ヘッダ | |
| MPX4250A_HALNAME_VERSION | oMPX4250A.c (.cpp) | MPX4250Aシリーズ用OSS-ECALプログラム |
| oMPX4250A.h | MPX4250Aシリーズ用OSS-ECALヘッダ | |
| MPX4250A_ARDUINO.ino | Arduino用サンプル・アプリケーション・プログラム | |
| oss_ecal.h | OSS-ECAL 共通ヘッダ | |
| user_setting.c (.cpp) | ユーザ設定定数・テーブル | |
| user_setting.h | ユーザ設定ヘッダ | |
| readme.md | Readme | |
| OSS-ECAL Terms of Use.txt | OSS-ECAL利用条件 |
* HALNAMEはHAL対応表を参照してください。
OSS-ECAL ダウンロード
OSS-ECALのダウンロードは、英語版OSS-ECALサイトからお願いいたします。なお、ダウンロードを行う際は、英語版OSS-ECALサイトにログインしてから操作してください。
組込み方法
ユーザプログラムに複数のOSS-ECAL(同じMCU機能の電子部品)を組み込む方法
ユーザプログラムに複数のOSS-ECAL(異なるMCU機能の電子部品)を組み込む方法
注意事項
サンプル版OSS-ECALは、優先順位の異なるThread(Task)や割込みで用いることを前提としていません。下記の例のような使い方はしないでください。
例)同じADCグループに各センサーが割り当てられ、優先順位が異なる処理でOSS-ECAL APIを実行すると、正しい値を取得できない場合があります。
ADC Gr0 Ch0 温度センサ AD22100A 100ms周期 Thread(優先順位低)で温度取込み
ADC Gr0 Ch1 圧力センサ MPX5999D イベント割込み(優先順位高)で圧力取込み