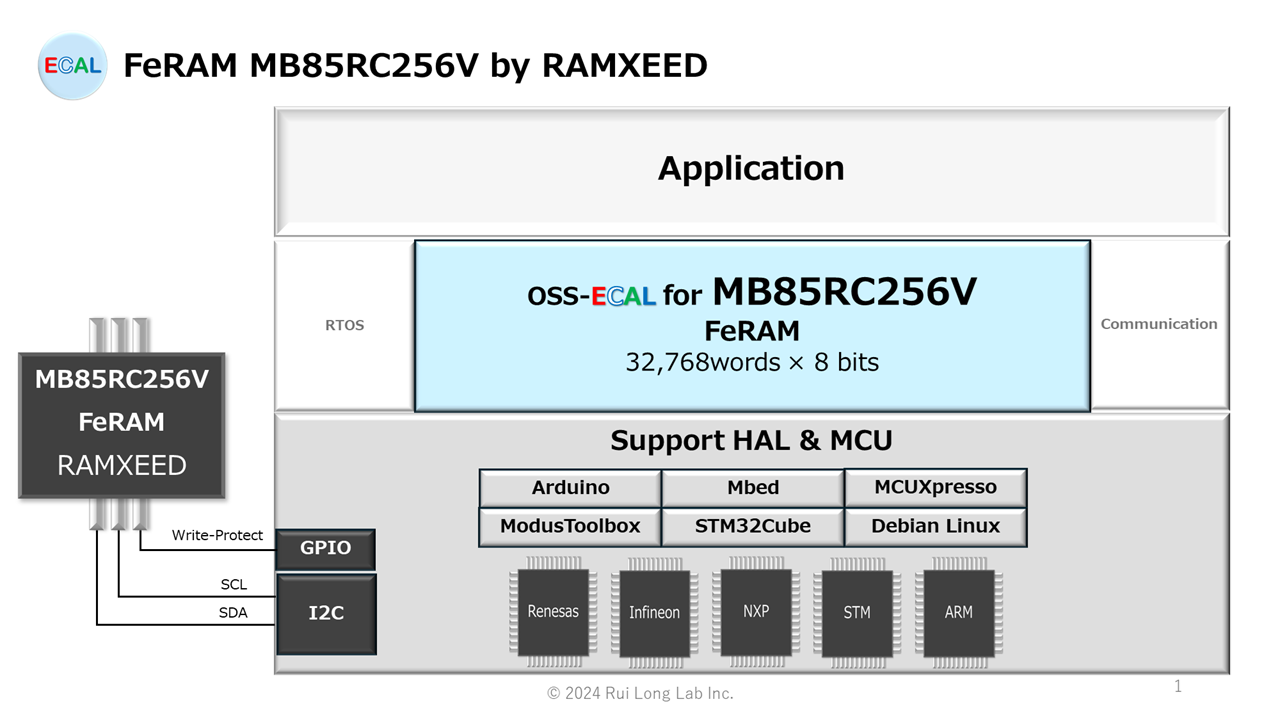
MB85RC256Vの概要と、MB85RC256V用OSS-ECALの提供についてご紹介いたします。MB85RC256Vは、RAMXEED(旧・富士通セミコンダクターメモリソリューション)製の32,768words × 8 bitsのFeRAM (Ferroelectric Random Access Memory) chipです。
MCUインタフェース:I2C, GPIO
ご注意:実際の設計などの前には、必ず最新版Datasheetをご参照くださいますようお願いいたします。
MB85RC256V
概要
MB85RC256Vは、不揮発性メモリセルを形成する強誘電体プロセスとシリコンゲートCMOS プロセスを用いた32,768
ワード×8 ビット構成のFeRAM (Ferroelectric Random Access Memory: 強誘電体ランダムアクセスメモリ) です。
MB85RC256Vは, SRAM のようにデータバックアップ用バッテリを使用しなくてもデータ保持が可能です。
MB85RC256Vに採用しているメモリセルは書込み/読出し動作でバイトあたり最低1012 回の耐久性があり, ほかの不揮
発性メモリ製品よりも大きく上回ります。
MB85RC256Vでは, フラッシュメモリやE2PROMのような長い書込み時間は不要のため, 1バイト単位での書込みを 実
現しています。 したがって, ライトビジー状態のような書込み完了待ちシーケンスは必要としません。
特徴
- ビット構成 : 32,768 ワード×8 ビット
- 2線式シリアル・インターフェース : シリアルクロック (SCL) とシリアルデータ(SDA) の2ポートですべての制御が可能
- 動作周波数 : 1 MHz (Max)
- 読み書き耐久性 : 1012 回 / バイト
- データ保持 : 10 年 ( + 85 °C), 95 年 ( + 55 °C), 200 年 ( + 35 °C) 以上
- 動作電源電圧 : 2.7 V to 5.5 V
- 低消費電力 : 動作電源電流 200 μA (Max @1 MHz) スタンバイ電流 27 μA (Typ)
- 動作周囲温度範囲 : − 40 °C to + 85 °C
- パッケージ : プラスチックSOP, 8 ピン (150mil)、プラスチック SOP, 8ピン (208mil)、両パッケージ品共にRoHS指令に適合しています。
OSS-ECAL仕様
API関数
OSS-ECALのAPI関数は、基本的に定周期Thread(TASK)から関数コールされることを前提としています。
etSTS oMB85RC256V_BYTE_WRITE( etCMP cmp, uint16 mem_adr, uint8 val )
oMB85RC256V_BYTE_WRITE関数は、MB85RC256Vに対して指定したアドレスmem_adrにvalの値をWriteするAPI関数です。
備考 :
この関数を使用する際には、oMB85RC256V_WP_DIS関数でライトプロテクトを解除してからご利用ください。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_PARAMETER | パラメータエラー(メモリアドレス) | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (iMXRT1051B1052B, STM32F4) | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| uint16 mem_adr | メモリアドレス | 0x0000 to 0x7fff | |
| uint8 val | 書き込むデータ |
etSTS oMB85RC256V_PAGE_WRITE( etCMP cmp, uint16 mem_adr, uint16 len, uint8* buf )
oMB85RC256V_PAGE_WRITE関数は、MB85RC256Vに対して指定したアドレスmem_adrから順番にbuf[0]からbuf[len-1]の値をWriteするAPI関数です。
備考 :
mem_adr + len > 0x7fffとなった場合、アドレスは0x0000にロールオーバーします。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_PARAMETER | パラメータエラー(メモリアドレス) | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (iMXRT1051B1052B, STM32F4) | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| uint16 mem_adr | メモリアドレス | 0x0000 to 0x7fff | |
| uint16 len | 書き込むByte数 | ||
| uint8* buf | 書き込むデータバッファ |
etSTS oMB85RC256V_CURRENT_READ( etCMP cmp, uint8* rlt )
oMB85RC256V_CURRENT_READ関数は、MB85RC256Vに対して前回のReadまたはWriteしたアドレス + 1から1Byte分の値をReadし、rltに保存するAPI関数です。
備考 :
前回のReadまたはWriteしたアドレス + 1 > 0x7fffとなった場合、アドレスは0x0000にロールオーバーします。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (iMXRT1051B1052B, STM32F4) | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| 引数 OUT | uint8* rlt | 読み込むデータ |
etSTS oMB85RC256V_RANDOM_READ( etCMP cmp, uint16 mem_adr, uint8* rlt )
oMB85RC256V_RANDOM_READ関数は、MB85RC256Vに対して指定したアドレスmem_adrから1Byte分の値をReadし、rltに保存するAPI関数です。
備考 :
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_PARAMETER | パラメータエラー(メモリアドレス) | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (iMXRT1051B1052B, STM32F4) | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| uint16 mem_adr | メモリアドレス | 0x0000 to 0x7fff | |
| 引数 OUT | uint8* rlt | 読み込むデータ |
etSTS oMB85RC256V_SEQ_READ( etCMP cmp, uint16 mem_adr, uint16 len, uint8* buf )
oMB85RC256V_SEQ_READ関数は、MB85RC256Vに対して指定したアドレスmem_adrから順番にlen分のデータを読み込み、buf[0]からbuf[len-1]に保存するAPI関数です。
備考 :
mem_adr + len > 0x7fffとなった場合、アドレスは0x0000にロールオーバーします。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_PARAMETER | パラメータエラー(メモリアドレス) | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (iMXRT1051B1052B, STM32F4) | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| uint16 mem_adr | メモリアドレス | 0x0000 to 0x7fff | |
| uint16 len | 読み込むByte数 | ||
| 引数 OUT | uint8* buf | 読み込むデータバッファ |
etSTS oMB85RC256V_DIAG_ID( etCMP cmp )
oMB85RC256V_DIAG_ID関数は、Manufacture IDとProduct IDを読み込み、Manufacture ID = RAMXEED (0x00A)およびProduct ID = 0x510の比較結果を戻り値として返すAPI関数です。
備考 :
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 比較結果 True | ||
| eSTS_ERR_DIAG | 比較結果 False | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 (iMXRT1051B1052B, STM32F4) | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード |
etSTS oMB85RC256V_WP_EN( etCMP cmp )
oMB85RC256V_WP_EN関数は、MB85RC256Vに対してWrite protect enable (write disable) = “Hi” 出力するAPI関数です。
備考 :
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_GPIO_OBJECT | GPIOオブジェクト選択エラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード |
etSTS oMB85RC256V_WP_DIS( etCMP cmp )
oMB85RC256V_WP_DIS関数は、MB85RC256Vに対してWrite protect disable (write enable) = “Low” 出力するAPI関数です。
備考 :
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_GPIO_OBJECT | GPIOオブジェクト選択エラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード |
HALサポート
OSS-ECALのHAL対応は、次の通りです。(順次拡大中)尚、同じHALであってもVerやMCU、開発環境が異なると動作が合わない場合がありますので、ご注意ください。
| メーカ | SDK/IDE ツール | HAL名称 | Ver | HALNAME | Support |
|---|---|---|---|---|---|
| Arduino | Arduino IDE | Arduino | 1.8.6 | ARDUINO | X |
| Arm | Keil MDK v6 | Mbed OS | 6.17.0 | MBED | X |
| Debian | – | GNU/Linux | 10.3 | Linux | X |
| Infineon | ModusToolbox | mtb-hal-cat1 | 2.4.3 | ModusToolbox | X |
| NXP | MCUXpresso SDK | SDK_2.x_EVKB-IMXRT1050 | 2.16 | iMXRT1051B1052B | X |
| Renesas | Synergy Software Package | HAL | 2.6.0 | SSP | – |
| STMicroelectronics | STM32Cube | STM32CubeF4 | V1.28.1 | STM32F4 | X |
開発環境
OSS-ECAL開発時のMCUおよび開発環境は、次の通りです。
| HALNAME | メーカ | 開発ボード | MCU | IDE |
|---|---|---|---|---|
| ARDUINO | Arduino | 1.Mega 2560 Rev3 2.Arduino Pro Mini 3.3V | ATmega2560 ATmega328P | Arduino IDE 2.3.3 |
| MBED | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | Arm Keil Studio Cloud |
| Linux | BeagleBoard | BeagleBone Black | TI AM335x | – |
| ModusToolbox | Infineon | CY8CPROTO-063-BLE PSoC 6 BLE Prototyping Kit | CYBLE-416045-02 | ModusToolbox |
| iMXRT1051B1052B | NXP | IMXRT1050-EVKB | i.MX RT1050 | MCUXpresso IDE |
| SSP | Renesas | S7G2 SK | R7FS7G27H3A01CFC | e² studio for Renesas Synergy |
| STM32F4 | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | STM32CubeIDE |
File構成
| フォルダ* | ファイル | 概要 |
|---|---|---|
| MB85RC256V_HALNAME_VERSION/sample | sample.c (.cpp) | サンプル・アプリケーション・プログラム |
| sample.h | サンプル・アプリケーション・ヘッダ | |
| MB85RC256V_HALNAME_VERSION | oMB85RC256V.c (.cpp) | MB85RC256Vシリーズ用OSS-ECALプログラム |
| oMB85RC256V.h | MB85RC256Vシリーズ用OSS-ECALヘッダ | |
| oss_ecal.h | OSS-ECAL 共通ヘッダ | |
| MB85RC256V_ARDUINO.ino | Arduino用サンプル・アプリケーション・プログラム | |
| user_setting.c (.cpp) | ユーザ設定定数・テーブル | |
| user_setting.h | ユーザ設定ヘッダ | |
| oHAL_i2c_stm32f4.c | STM32Cube FW_F4用HALプログラム | |
| oHAL_i2c_stm32f4.h | STM32Cube FW_F4用HALヘッダ | |
| readme.md | Readme | |
| OSS-ECAL Terms of Use.txt | OSS-ECAL利用条件 |
* HALNAMEはHAL対応表を参照してください。
OSS-ECAL ダウンロード
OSS-ECALのダウンロードは、英語版OSS-ECALサイトからお願いいたします。なお、ダウンロードを行う際は、英語版OSS-ECALサイトにログインしてから操作してください。
組込み方法
下記を参考にユーザプログラムにAPI関数を組み込んでください。
Pin A0, A1, A2の設定は、user_setting.hの以下のコードで設定してください。
// Device address Code bit2:A2, bit1:A1, bit0:A0
#define MB85RC256V_1 0b00000111Infineon ModusToolbox HALの場合は、I2C Timeoutの設定をuser_setting.hの以下のコードで設定してください。
詳しくは、cyhal_i2c_master_write(), cyhal_i2c_master_read() Parameters timeoutを参照してください。
#define I2C_TIMEOUT 10U // Timeout[ms] STM32Cube FW_F4 HALの場合、I2C Timeout時間は25msです。
注意:
次のコマンドAPI関数は、Read/Writeのデータ長lenによって、Timeoutの時間が異なります。
etSTS oMB85RC256V_PAGE_WRITE( etCMP cmp, uint16 mem_adr, uint16 len, uint8* buf )
etSTS oMB85RC256V_SEQ_READ( etCMP cmp, uint16 mem_adr, uint16 len, uint8* buf )
ユーザプログラムに複数のOSS-ECAL(同じMCU機能の電子部品)を組み込む方法
ユーザプログラムに複数のOSS-ECAL(異なるMCU機能の電子部品)を組み込む方法
注意事項
サンプル版OSS-ECALは、優先順位の異なるThread(Task)や割込みで用いることを前提としていません。下記の例のような使い方はしないでください。
例)同じADCグループに各センサーが割り当てられ、優先順位が異なる処理でOSS-ECAL APIを実行すると、正しい値を取得できない場合があります。
ADC Gr0 Ch0 温度センサ AD22100A 100ms周期 Thread(優先順位低)で温度取込み
ADC Gr0 Ch1 圧力センサ MPX5999D イベント割込み(優先順位高)で圧力取込み