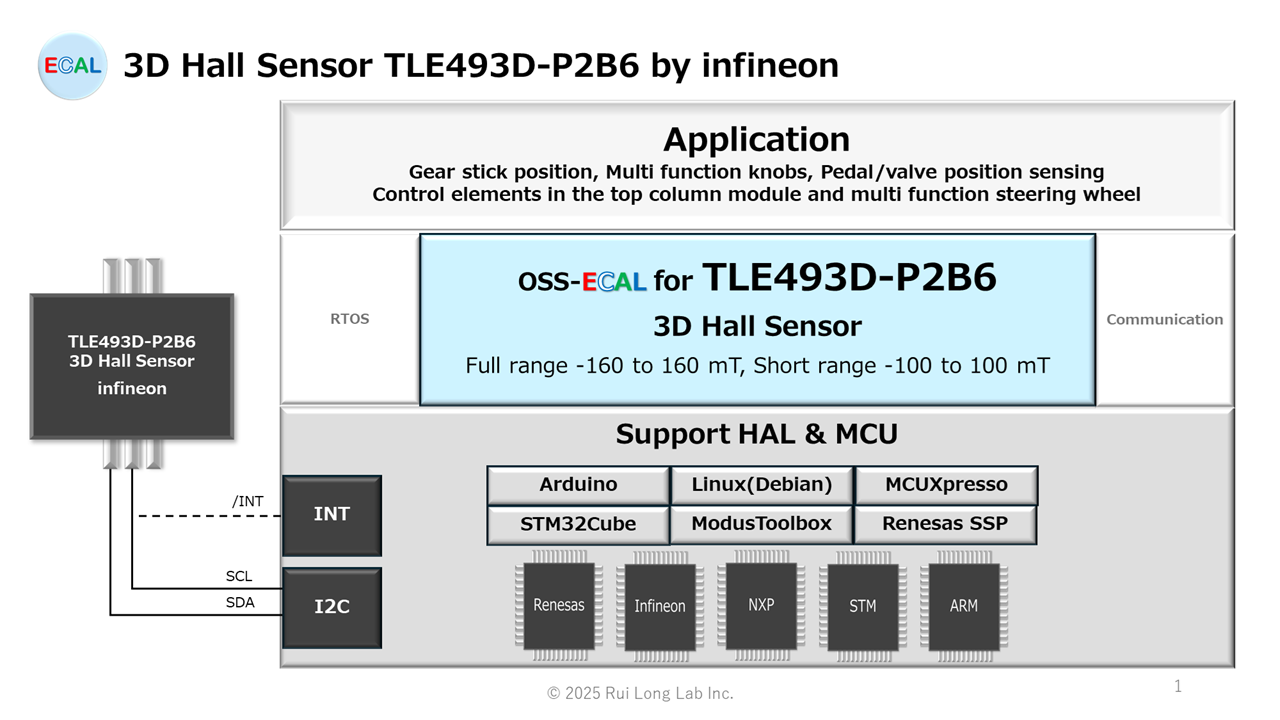
TLE493D-P2B6の概要と、TLE493D-P2B6用OSS-ECALの提供についてご紹介いたします。TLE493D-P2B6は、Infineon社製の高精度低消費電力3Dホールセンサー(Full range -160 to 160 mT, Short range -100 to 100 mT)です。
MCUインタフェース:I2C
ご注意:このリソースの元の言語は英語です。 翻訳は概要を便宜的に提供するもので、機械翻訳を使用していることがあり、私たちは翻訳の正確性および妥当性につきましては一切保証いたしません。 また、実際の設計などの前には、必ず最新版Datasheetをご参照くださいますようお願いいたします。
TLE493D-P2B6
概要
この3次元ホール効果センサーは、マイクロコントローラーで設定することができます。測定データはデジタル形式でマイクロコントローラーに送信されます。マイクロコントローラーがマスターで、センサーがスレーブです。また、テスト機能やスリープ状態のシステムをウェイクアップする機能も備えています。
特徴
- 3D(X、Y、Z)磁束密度センシング ±160 mT
- 65µT(typ)までプログラム可能なフラックス分解能
- X-Y角度測定モード
- センサーのデジタル部品、アナログ部品、ホールプローブをチェックする診断測定
- ウェイクアップ機能および消費電力7 nA(typ)のパワーダウン・モード
- 各測定方向に12ビットのデータ分解能と10ビットの温度センサーを装備
- 可変更新周波数と電力モード(動作中に設定可能)
- 温度範囲 Tj = -40°C…125°C, 電源電圧範囲 = 2.8 V…3.5 V
- I2Cプロトコルによる外部µCからのトリガーが可能
- マイクロコントローラーに有効な測定を示す割り込み信号
用途
TLE493D-P2B6は、以下のような幅広い磁気センシング用に設計されています:
- ギアスティックの位置
- トップコラムモジュールとマルチファンクションステアリングホイールのコントロールエレメント
- 多機能ノブ
- ペダル/バルブポジション・センシング
メリット
- 3次元磁気測定原理による部品削減
- 高い柔軟性により、幅広いアプリケーションに対応可能
- デバイスのコンフィギュレーションによるプラットフォーム適応性
- 統合診断による機能安全のサポート
- ウェイクアップモードにより、システム消費電力が非常に低く、バッテリ駆動時間の延長が可能
- 高い磁束測定範囲と比較すると、小さな漂遊磁場の妨害は無視できる
OSS-ECAL仕様
API関数
OSS-ECALのAPI関数は、基本的に定周期Thread(TASK)から関数コールされることを前提としています。
提供時の設定値
| Label Name | Description | Set value at the time of provision |
|---|---|---|
| TLE493D_P2B6_TYPE | Product Typeを次の値から選択。 eTLE493D_P2B6_A0: Product Type A0 eTLE493D_P2B6_A1: Product Type A1 eTLE493D_P2B6_A2: Product Type A2 eTLE493D_P2B6_A3: Product Type A3 | eTLE493D_P2B6_A0 |
| I2C_PROTOCOL_INI | I²C 1バイトまたは2バイト読み出しプロトコルを次の値から選択。 i1BYTE: 1byte i2BYTE: 2byte | i1BYTE |
| WAKEUP_FEATURE | Register WU bit6 WUを次の値から選択。 iENABLE: Enable iDISABLE: Disable | iDISABLE |
| WAKEUP_XL_INI | Register XLの設定値。 X-Direction : Wake Up lower threshold [mT] | 0.0F |
| WAKEUP_XH_INI | Register XHの設定値。 X-Direction : Wake Up lower threshold [mT] | 0.0F |
| WAKEUP_YL_INI | Register YLの設定値。 X-Direction : Wake Up lower threshold [mT] | 0.0F |
| WAKEUP_YH_INI | Register YHの設定値。 Y-Direction : Wake Up upper threshold [mT] | 0.0F |
| WAKEUP_ZL_INI | Register ZLの設定値。 Z-Direction : Wake Up lower threshold [mT] | 0.0F |
| WAKEUP_ZH_INI | Register ZHの設定値。 Z-Direction : Wake Up upper threshold [mT] | 0.0F |
| SENSITIVITY | Full-rangeまたはShort-rangeを次の値から選択。 iRANGE_FULL: Full-range iRANGE_SHORT: Short-range | iRANGE_FULL |
| Config_INI | Register Configの設定値 | bit7 DT = 0 bit6 AM = 0 bit5:4 TRIG = 00 bit3 X2 = 0 bit2:1 TL_mag = 00 bit0 CP = 1 |
| READ_OUT | 磁気データを12bitまたは8bitで読み込むか次の値から選択。 i12BITS: 12bit i8BITS: 8bit | i12BITS |
| POWER_MODE | Power Modeを次の値から選択。 eLOW_POWER_MODE: Low power mode eMASTER_CONTROL_MODE: Master control mode eFAST_MODE: Fast mode | eMASTER_CONTROL_MODE |
| UPDATE_RATE_INI | Register MOD2 PRDの周波数設定を次の値から選択。 eRATE_700_HZ: 770 Hz eRATE_97_HZ: 97 Hz eRATE_24_HZ: 24 Hz eRATE_12_HZ: 12 Hz eRATE_6_HZ: 6 Hz eRATE_3_HZ: 3 Hz eRATE_0_4_HZ: 0.4 Hz eRATE_0_05_HZ: 0.05 Hz | eRATE_12_HZ |
etSTS oTLE493D_P2B6_RESET( void )
oTLE493D_P2B6_RESET関数は、TLE493D-P2B6をリセットするAPI関数です。
– Step1 Send 0xFF
– Step2 Send 0xFF again
– Step3 Send 0x00
– Step4 Send 0x00 again
– Step5 Wait 30μs required after device reset to ensure stable startup
– Step6 Correct CP bit
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー |
etSTS oTLE493D_P2B6_INIT( void )
oTLE493D_P2B6_INIT関数は、リセット後にTLE493D-P2B6を設定するAPI関数です。
– Step1 Configuration bus
– Step2 Disable Interrupt before other settings
– Step3 Sensor Configuration
– Step4 Disable Test Mode
– Step5 Enable/Disable Wake-Up
– Step6 Set Wake-Up Threshold
– Step7 Set Power Mode
– Step8 Set Update Rate
– Step9 Enable/Disable Collision Avoidance or Clock Stretching
– Step10 Enable/Disable Interrupt
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_PARAMETER | 次のいづれかの場合 1. I2C_PROTOCOL_INIの値が次の値以外の場合 i1BYTE, i2BYTES 2. TLE493D_P2B6_TYPEの値が次の値以外の場合 eTLE493D_P2B6_A0, eTLE493D_P2B6_A1, eTLE493D_P2B6_A2, eTLE493D_P2B6_A3 3. Wake-up Thresholdの値が次の場合 WAKEUP_XL_INI > WAKEUP_XH_INI WAKEUP_YL_INI > WAKEUP_YH_INI WAKEUP_ZL_INI > WAKEUP_ZH_INI 4.Wake-up Thresholdの設定値が次の範囲以外の場合 iMIN_TLE493D_P2B6_XL_f ≦ WAKEUP_XL_INI ≦ iMAX_TLE493D_P2B6_XL_f iMIN_TLE493D_P2B6_YL_f ≦ WAKEUP_YL_INI ≦ iMAX_TLE493D_P2B6_YL_f iMIN_TLE493D_P2B6_ZL_f ≦ WAKEUP_ZL_INI ≦ iMAX_TLE493D_P2B6_ZL_f iMIN_TLE493D_P2B6_XH_f ≦ WAKEUP_XHL_INI ≦ iMAX_TLE493D_P2B6_XH_f iMIN_TLE493D_P2B6_YH_f ≦ WAKEUP_YH_INI ≦ iMAX_TLE493D_P2B6_YH_f iMIN_TLE493D_P2B6_ZH_f ≦ WAKEUP_ZH_INI ≦ iMAX_TLE493D_P2B6_ZH_f 5. POWER_MODEの値が次の値以外の場合 eLOW_POWER_MODE, eFAST_MODE, eMASTER_CONTROL_MODE 6. UPDATE_RATE_INIの値が次の値以外の場合 eRATE_700_HZ, eRATE_97_HZ, eRATE_24_HZ, eRATE_12_HZ, eRATE_6_HZ, eRATE_3_HZ, eRATE_0_4_HZ, eRATE_0_05_HZ | ||
| eSTS_ERR_DIAG | 次のいづれかの場合 1. Fuse Parity Error 2. Register Diag CF = 0 3. Register Diag T = 1 |
etSTS oTLE493D_P2B6_WRITE_WAKEUP( uint8 wu_sts )
oTLE493D_P2B6_WRITE_WAKEUP関数は、Wake-up機能の有効/無効を設定するAPI関数です。
– Step1 Read all registers and retrieve the WU, Config, and Diag register values
– Step2 Confirm test mode is disabled and CF = 1
– Step3 Write Register 0x0D( WU ) : Setting wake-up bit
– Step4 Write Register 0x0D( WU ) : Setting wake-up
– Step5 Write Register 0x10(Config): Update CP bit
Note:Wake-up機能が有効な場合は、Test Mode機能を無効にしなければなりません。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_DIAG | 次のいづれかの場合 1. Register Diag CF = 0 2. Register Diag T = 1 | ||
| 引数 IN | uint8 wu_sts | Wake-up機能の有効/無効を設定 | 次の値から選択 iENABLE, iDISABLE |
etSTS oTLE493D_P2B6_WRITE_WAKEUP_THRES( float32 thres_xl, float32 thres_yl, float32 thres_zl, float32 thres_xh, float32 thres_yh, float32 thres_zh )
oTLE493D_P2B6_WRITE_WAKEUP_THRES関数は、Wake-up機能のスレッシュホールドを設定するAPI関数です。
– Step1 Check Threshold
– Step2 Set Wake-Up Lower Threshold
– Step3 Set Wake-Up Upper Threshold
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_PARAMETER | 次のいづれかの場合 1. Wake-up Thresholdの値が次の場合 thres_xl > thres_xh thres_yl > thres_yh thres_zl > thres_zh 2.Wake-up Thresholdの設定値が次の範囲以外の場合 iMIN_TLE493D_P2B6_XL_f ≦ thres_xl ≦ iMAX_TLE493D_P2B6_XL_f iMIN_TLE493D_P2B6_YL_f ≦ thres_yl ≦ iMAX_TLE493D_P2B6_YL_f iMIN_TLE493D_P2B6_ZL_f ≦ thres_zl ≦ iMAX_TLE493D_P2B6_ZL_f iMIN_TLE493D_P2B6_XH_f ≦ thres_xh ≦ iMAX_TLE493D_P2B6_XH_f iMIN_TLE493D_P2B6_YH_f ≦ thres_yh ≦ iMAX_TLE493D_P2B6_YH_f iMIN_TLE493D_P2B6_ZH_f ≦ thres_zh ≦ iMAX_TLE493D_P2B6_ZH_f full range iMIN_TLE493D_P2B6_XL_f -160.0mT iMAX_TLE493D_P2B6_XL_f 160.0mT iMIN_TLE493D_P2B6_YL_f -160.0mT iMAX_TLE493D_P2B6_YL_f 160.0mT iMIN_TLE493D_P2B6_ZL_f -160.0mT iMAX_TLE493D_P2B6_ZL_f 160.0mT short range iMIN_TLE493D_P2B6_XL_f -100.0mT iMAX_TLE493D_P2B6_XL_f 100.0mT iMIN_TLE493D_P2B6_YL_f -100.0mT iMAX_TLE493D_P2B6_YL_f 100.0mT iMIN_TLE493D_P2B6_ZL_f -100.0mT iMAX_TLE493D_P2B6_ZL_f 100.0mT | ||
| 引数 IN | float32 thres_xl | Wake-Up Lower X Threshold | full range 7.7LSB/mT (Typ.) short range 15.4LSB/mT (Typ.) |
| float32 thres_yl | Wake-Up Lower Y Threshold | full range 7.7LSB/mT (Typ.) short range 15.4LSB/mT (Typ.) | |
| float32 thres_zl | Wake-Up Lower Z Threshold | full range 7.7LSB/mT (Typ.) short range 15.4LSB/mT (Typ.) | |
| float32 thres_xh | Wake-Up Upper X Threshold | full range 7.7LSB/mT (Typ.) short range 15.4LSB/mT (Typ.) | |
| float32 thres_yh | Wake-Up Upper Y Threshold | full range 7.7LSB/mT (Typ.) short range 15.4LSB/mT (Typ.) | |
| float32 thres_zh | Wake-Up Upper Z Threshold | full range 7.7LSB/mT (Typ.) short range 15.4LSB/mT (Typ.) |
etSTS oTLE493D_P2B6_WRITE_POWER_MODE( etTLE493D_P2B6_POWER power )
oTLE493D_P2B6_WRITE_POWER_MODE関数は、Power Modeを設定するAPI関数です。
– Step1 Validate input and determine MODE bitsValidate input and determine MODE bits
– Step2 Read 0x11(MOD1), 0x13(MOD2) Register Value and Check Fuse Parity
– STep3 Write Register 0x11( MOD1 ) : Setting Power mode
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_PARAMETER | 次の値以外の場合 eLOW_POWER_MODE, eFAST_MODE, eMASTER_CONTROL_MODE | ||
| eSTS_ERR_DIAG | Fuse Parity Error | ||
| 引数 IN | etTLE493D_P2B6_POWER power | Register MOD1 MODEの設定値 | 次の値から選択 eLOW_POWER_MODE, eFAST_MODE, eMASTER_CONTROL_MODE |
etSTS oTLE493D_P2B6_WRITE_RATE( etTLE493D_P2B6_RATE rate )
oTLE493D_P2B6_WRITE_RATE関数は、センシング周期を設定するAPI関数です。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_PARAMETER | 次の値以外の場合 eRATE_700_HZ, eRATE_97_HZ, eRATE_24_HZ, eRATE_12_HZ, eRATE_6_HZ, eRATE_3_HZ, eRATE_0_4_HZ, eRATE_0_05_HZ | ||
| eSTS_ERR_DIAG | Fuse Parity Error | ||
| 引数 IN | etTLE493D_P2B6_RATE rate | Register MOD2 PRDの設定値 | 次の値から選択 eRATE_700_HZ, eRATE_97_HZ, eRATE_24_HZ, eRATE_12_HZ, eRATE_6_HZ, eRATE_3_HZ, eRATE_0_4_HZ, eRATE_0_05_HZ |
etSTS oTLE493D_P2B6_WRITE_INT( uint8 en_dis )
oTLE493D_P2B6_WRITE_INT関数は、/INT機能の有効/無効を設定するAPI関数です。
– Step1 Read 0x11(MOD1), 0x13(MOD2) Register Value and Check Fuse Parity
– Step2 Write Register 0x11( MOD1 ) : Interrupt enable/disable
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_DIAG | Fuse Parity Error | ||
| 引数 IN | uint8 en_dis | Register MOD1 INTの設定値 | 次の値から選択 iENABLE, iDISABLE |
etSTS oTLE493D_P2B6_WRITE_CA( uint8 ca )
oTLE493D_P2B6_WRITE_CA関数は、Collision avoidance機能の有効/無効を設定するAPI関数です。
– Step1 Read 0x11(MOD1), 0x13(MOD2) Register Value and Check Fuse Parity
– Step2 Write Register 0x11( MOD1 ) : Setting Collision avoidance
Note:クロック・ストレッチは、Master-controlledおよびLow-Powerモードでのみサポートされます。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_DIAG | Fuse Parity Error | ||
| 引数 IN | uint8 ca | Register MOD1 CAの設定値 | 次の値から選択 iENABLE, iDISABLE |
etSTS oTLE493D_P2B6_WRITE_TEST_MODE( etTLE493D_P2B6_TEST mode )
oTLE493D_P2B6_WRITE_TEST_MODE関数は、Test Mode機能を設定するAPI関数です。
– Step1 Input validation and determine Regsiter TMode TST bit
– Step2 Update Regsiter TMode TST bits
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_PARAMETER | 次の値以外の場合 eTEST_MODE_NO, eTEST_MODE_VAHLL, eTEST_MODE_SPIN, eTEST_MODE_SAT | ||
| eSTS_ERR_DIAG | Fuse Parity Error | ||
| 引数 IN | etTLE493D_P2B6_TEST mode | Regsiter TMode TSTの設定値 | 次の値から選択 eTEST_MODE_NO, eTEST_MODE_VAHLL, eTEST_MODE_SPIN, eTEST_MODE_SAT |
etSTS oTLE493D_P2B6_WRITE_TRIGGER( etTLE493D_P2B6_TRIGGER trig_type )
oTLE493D_P2B6_WRITE_TRIGGER関数は、Trigger機能を設定するAPI関数です。
– Step1 Validate input and determine Register Config TRIG bits
– Step2 Update Register Config TRIG bits
– Step3 Write Register 0x10( Config ) : Setting Trigger
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_PARAMETER | 次の値以外の場合 eTRIG_NO_TRIGGER, eTRIG_AFTER_WRITE, eTRIG_BEFORE_MSB, eTRIG_AFTER_05H | ||
| 引数 IN | etTLE493D_P2B6_TRIGGER trig_type | Register Config TRIGの設定値 | 次の値から選択 eTRIG_NO_TRIGGER, eTRIG_AFTER_WRITE, eTRIG_BEFORE_MSB, eTRIG_AFTER_05H |
etSTS oTLE493D_P2B6_READ_MAG_RAW( stTLE493D_P2B6_RAW_O* rlt )
oTLE493D_P2B6_READ_MAG_RAW関数は、X軸、Y軸、Z軸の磁場RAW(生データ)値の読み出すAPI関数です。
Note:この関数を使用して、温度が不要な場合に磁気測定を高速化できます。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 OUT | stTLE493D_P2B6_RAW_O* rlt | Register Bx, By and Bzの読み出し値 sint16 rlt.raw_bx [mT/LSB] sint16 rlt.raw_by [mT/LSB] sint16 rlt.raw_bz [mT/LSB] |
etSTS oTLE493D_P2B6_READ_MAG( stTLE493D_P2B6_O* rlt )
oTLE493D_P2B6_READ_MAG関数は、X軸、Y軸、Z軸磁気データの読み出すAPI関数です。
Note:この関数を使用して、温度が不要な場合に磁気測定を高速化できます。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_MAX | full-range:160.0mTを超えた場合 short-range:100.0mTを超えた場合 | ||
| eSTS_ERR_MIN | full-range:-160.0mT未満の場合 short-range:-100.0mT未満の場合 | ||
| 引数 OUT | stTLE493D_P2B6_O* rlt | Register Bx, By and Bzの磁気データ float32 rlt.bx [mT] float32 rlt.by [mT] float32 rlt.bz [mT] |
etSTS oTLE493D_P2B6_READ_MAG_TEMP_RAW( stTLE493D_P2B6_RAW_O* rlt )
oTLE493D_P2B6_READ_MAG_TEMP_RAW関数は、X軸、Y軸、Z軸磁場および温度のRAW(生データ)値の読み出すAPI関数です。
Note:この関数を使用するには、温度測定を有効にする必要があります。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 OUT | stTLE493D_P2B6_O* rlt | Register Bx, By, Bz and Tempの読み出し値 sint16 rlt.raw_bx [mT/LSB] sint16 rlt.raw_by [mT/LSB] sint16 rlt.raw_bz [mT/LSB] sint16 rlt.raw_temp [°C] |
etSTS oTLE493D_P2B6_READ_MAG_TEMP( stTLE493D_P2B6_O* rlt )
oTLE493D_P2B6_READ_MAG_TEMP関数は、X軸、Y軸、Z軸磁気データおよび温度データの読み出すAPI関数です。
Note:この関数を使用するには、温度測定を有効にする必要があります。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_MAX | 次のいづれかの場合 1. Bx > iMAX_TLE493D_P2B6_BX_f 2. By > iMAX_TLE493D_P2B6_BY_f 3. Bz > iMAX_TLE493D_P2B6_BZ_f 4. temp > 125.0 °C full range iMAX_TLE493D_P2B6_BX_f 160.0mT iMAX_TLE493D_P2B6_BY_f 160.0mT iMAX_TLE493D_P2B6_BZ_f 160.0mT short range iMAX_TLE493D_P2B6_BX_f 100.0mT iMAX_TLE493D_P2B6_BY_f 100.0mT iMAX_TLE493D_P2B6_BZ_f 100.0mT | ||
| eSTS_ERR_MIN | 次のいづれかの場合 1. Bx < iMIN_TLE493D_P2B6_BX_f 2. By < iMIN_TLE493D_P2B6_BY_f 3. Bz < iMIN_TLE493D_P2B6_BZ_f 4. temp < -40.0 °C full range iMIN_TLE493D_P2B6_BX_f -160.0mT iMIN_TLE493D_P2B6_BY_f -160.0mT iMIN_TLE493D_P2B6_BZ_f -160.0mT short range iMIN_TLE493D_P2B6_BX_f -100.0mT iMIN_TLE493D_P2B6_BY_f -100.0mT iMIN_TLE493D_P2B6_BZ_f -100.0mT | ||
| 引数 OUT | stTLE493D_P2B6_O* rlt | Register Bx, By and Bzの磁気データ Register Tempの温度値 float32 rlt.bx [mT] float32 rlt.by [mT] float32 rlt.bz [mT] float32 rlt.temp [°C] |
etSTS oTLE493D_P2B6_READ_DIAG( uint8* diag )
oTLE493D_P2B6_READ_DIAG関数は、Register Diagの診断情報を読み出すAPI関数です。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_DIAG | Fuse Parity Error | ||
| 引数 IN | uint8 ca | Register Diagの読み出し値 |
etSTS oTLE493D_P2B6_READ_REG( uint8* reg )
oTLE493D_P2B6_READ_REG関数は、全てのRegisterの値を読み出すAPI関数です。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| eSTS_ERR_DIAG | Fuse Parity Error | ||
| 引数 OUT | uint8* reg | reg[0] = Register Bx reg[1] = Register By reg[2] = Register Bz reg[3] = Register Temp reg[4] = Register Bx2 reg[5] = Register Temp2 reg[6] = Register Diag reg[7] = Register XL reg[8] = Register XH reg[9] = Register YL reg[10] = Register YH reg[11] = Register ZL reg[12] = Register ZH reg[13] = Register WU reg[14] = Register TMode reg[15] = Register TPhase reg[16] = Register Config reg[17] = Register MOD1 reg[18] = Register Reserved reg[19] = Register MOD2 reg[20] = Register Reserved reg[21] = Register Reserved reg[22] = Register Ver |
Sampleアプリケーション
OSS-ECALには、sampleフォルダ内にサンプルアプリケーションが含まれています。ここでは、そのアプリケーションの概要について説明いたします。OSS-ECALを皆様の製品プログラムに組み込む際の参考資料としてご活用ください。

| State | vgTLE493D_P2B6_COMMAND | 状態遷移条件 | 処理概要 | API関数 |
|---|---|---|---|---|
| Initialize | iTLE493D_P2B6_INITIALIZE | 初回 | TLE493D-P2B6 Initialize State | oTLE493D_P2B6_RESET oTLE493D_P2B6_WRITE_TRIGGER |
| Measure | iTLE493D_P2B6_MEASURE | 1. Initialize完了 2. vgTLE493D_P2B6_COMMAND= iTLE493D_P2B6_MEASURE | 3Dホール磁気計測 | oTLE493D_P2B6_READ_DIAG oTLE493D_P2B6_READ_MAG_TEMP |
| Self-test | iTLE493D_P2B6_SELF_TEST | vgTLE493D_P2B6_COMMAND= iTLE493D_P2B6_SELF_TEST | セルフテスト | oTLE493D_P2B6_WRITE_TEST_MODE oTLE493D_P2B6_WRITE_TRIGGER oTLE493D_P2B6_READ_MAG_TEMP_RAW |
| Error | iTLE493D_P2B6_ERROR | vgTLE493D_P2B6_COMMAND= iTLE493D_P2B6_ERROR | Error処理 | -* |
| Low Power | iTLE493D_P2B6_LOW_POWER | vgTLE493D_P2B6_COMMAND= iTLE493D_P2B6_LOW_POWER | Low Power | oTLE493D_P2B6_WRITE_POWER_MODE |
* 製品プログラムで対応してください。
HALサポート
OSS-ECALのHAL対応は、次の通りです。(順次拡大中)尚、同じHALであってもVerやMCU、開発環境が異なると動作が合わない場合がありますので、ご注意ください。
| メーカ | SDK/IDE ツール | HAL名称 | Ver | HALNAME | Support |
|---|---|---|---|---|---|
| Arduino | Arduino IDE | Arduino | 1.8.6 | ARDUINO | X |
| Debian | – | GNU/Linux | 10.3 | Linux | X |
| Infineon | ModusToolbox | mtb-hal-cat1 | 2.4.3 | ModusToolbox | X |
| NXP | MCUXpresso SDK | SDK_2.x_EVKB-IMXRT1050 | 2.16 | iMXRT1051B1052B | X |
| Renesas | Synergy Software Package | HAL | 2.6.0 | SSP | X |
| STMicroelectronics | STM32Cube | STM32CubeF4 | V1.28.1 | STM32F4 | X |
開発環境
OSS-ECAL開発時のMCUおよび開発環境は、次の通りです。
| HALNAME | メーカ | 開発ボード | MCU | IDE |
|---|---|---|---|---|
| ARDUINO | Arduino | 1.Mega 2560 Rev3 2.Arduino Pro Mini 3.3V | ATmega2560 ATmega328P | Arduino IDE 2.3.3 |
| Linux | BeagleBoard | BeagleBone Black | TI AM335x | – |
| ModusToolbox | Infineon | CY8CPROTO-063-BLE PSoC 6 BLE Prototyping Kit | CYBLE-416045-02 | ModusToolbox |
| iMXRT1051B1052B | NXP | IMXRT1050-EVKB | i.MX RT1050 | MCUXpresso IDE |
| SSP | Renesas | S7G2 SK | R7FS7G27H3A01CFC | e² studio for Renesas Synergy |
| STM32F4 | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | STM32CubeIDE |
File構成
| フォルダ* | ファイル | 概要 |
|---|---|---|
| TLE493D_P2B6_HALNAME_VERSION/sample | sample.c (.cpp) | サンプル・アプリケーション・プログラム |
| sample.h | サンプル・アプリケーション・ヘッダ | |
| TLE493D_P2B6_HALNAME_VERSION | oTLE493D_P2B6.c (.cpp) | TLE493D-P2B6用OSS-ECALプログラム |
| oTLE493D_P2B6.h | TLE493D-P2B6用OSS-ECALヘッダ | |
| oTLE493D_P2B6_user.h | TLE493D-P2B6用ユーザ設定ヘッダ | |
| oss_ecal.h | OSS-ECAL 共通ヘッダ | |
| TLE493D_P2B6_ARDUINO.ino | Arduino用サンプル・アプリケーション・プログラム | |
| user_setting.c (.cpp) | ユーザ設定定数・テーブル | |
| user_setting.h | ユーザ設定ヘッダ | |
| oHAL_i2c_stm32f4.c | STM32Cube FW_F4用HALプログラム | |
| oHAL_i2c_stm32f4.h | STM32Cube FW_F4用HALヘッダ | |
| readme.md | Readme | |
| OSS-ECAL Terms of Use.txt | OSS-ECAL利用条件 |
* HALNAMEは、HALサポートを参照してください。
OSS-ECAL ダウンロード
OSS-ECALのダウンロードは、英語版OSS-ECALサイトからお願いいたします。なお、ダウンロードを行う際は、英語版OSS-ECALサイトにログインしてから操作してください。
組込み方法
ユーザプログラムに複数のOSS-ECAL(同じMCU機能の電子部品)を組み込む方法
ユーザプログラムに複数のOSS-ECAL(異なるMCU機能の電子部品)を組み込む方法
注意事項
サンプル版OSS-ECALは、優先順位の異なるThread(Task)や割込みで用いることを前提としていません。下記の例のような使い方はしないでください。
例)同じADCグループに各センサーが割り当てられ、優先順位が異なる処理でOSS-ECAL APIを実行すると、正しい値を取得できない場合があります。
ADC Gr0 Ch0 温度センサ AD22100A 100ms周期 Thread(優先順位低)で温度取込み
ADC Gr0 Ch1 圧力センサ MPX5999D イベント割込み(優先順位高)で圧力取込み