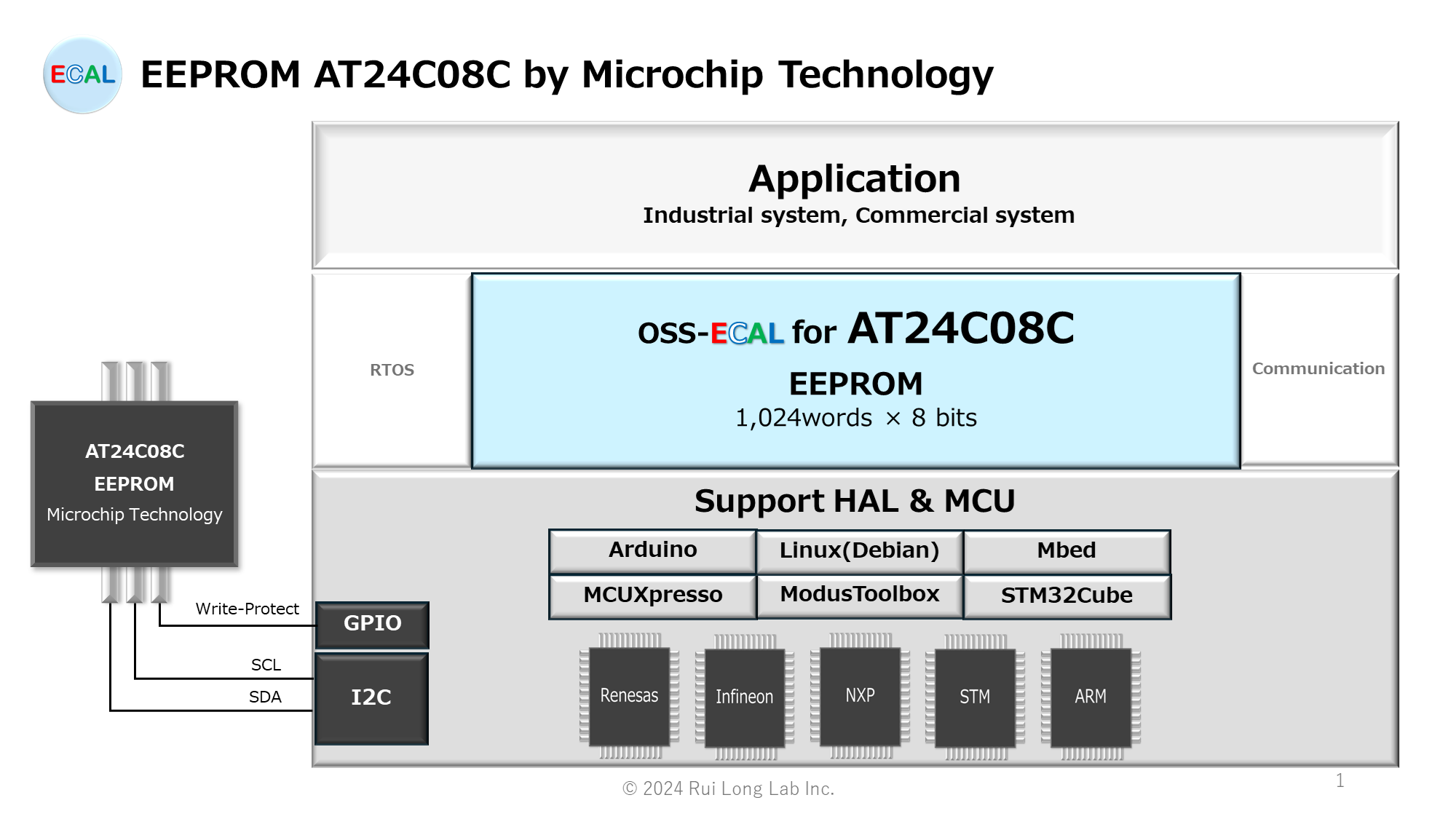
AT24C08Cの概要と、AT24C08C用OSS-ECALの提供についてご紹介いたします。AT24C08Cは、Microchip Technology製の1,024words × 8 bitsのEEPROM(Electrically Erasable and Programmable Read-Only Memory) chipです。
MCUインタフェース:I2C
ご注意:このリソースの元の言語は英語です。 翻訳は概要を便宜的に提供するもので、機械翻訳を使用していることがあり、私たちは翻訳の正確性および妥当性につきましては一切保証いたしません。 また、実際の設計などの前には、必ず最新版Datasheetをご参照くださいますようお願いいたします。
AT24C08C
概要
AT24C08Cは、各8ビットの1,024ワードとして編成された8,192ビットのシリアルEEPROM (Electrically Erasable and Programmable Read-Only Memory) を提供します。このデバイスのカスケード機能により、最大2つのデバイスが共通の2線式バスを共有できます。これらのデバイスは、低消費電力と低電圧動作が不可欠な多くの産業用および商業用アプリケーションでの使用に最適化されています。このデバイスは、省スペースの8ピンSOIC、8ピンTSSOP、8ピンUDFN、8ピンPDIP、5ピンSOT23、および8ボールVFBGAパッケージで提供されます。すべてのパッケージは1.7V~5.5Vで動作します。
特徴
- 低電圧動作 : VCC = 1.7V to 5.5V
- 内臓 1,024×8(8K)
- 工業用温度範囲 : -40°C to +85°C
- I2C互換(2線式)シリアル・インターフェース : 100 kHz Standard mode, 1.7V to 5.5V, 400 kHz Fast mode, 1.7V to 5.5V, 1 MHz Fast Mode Plus (FM+), 2.5V to 5.5V
- シュミット・トリガー、ノイズ抑制のためのフィルター付き入力
- 双方向データ転送プロトコル
- フルアレイ・ハードウェアデータ保護用ライトプロテクト端子
- 超低アクティブ電流(最大3 mA)およびスタンバイ電流(最大6 μA)
- 16バイト・ページ書き込みモード : 部分的なページの書き込みが可能
- ランダム・リード・モードとシーケンシャル・リード・モード
- 自己タイミング書き込みサイクル 最大5ms以内
- ESD保護 > 4,000V
- 高い信頼性:1,000,000書き込みサイクル, データの保持100年
- グリーンパッケージオプション(鉛フリー/ハライドフリー/RoHS対応)
- 金型販売オプション:ウェハーフォームとテープ&リールをご用意
OSS-ECAL仕様
API関数
OSS-ECALのAPI関数は、基本的に定周期Thread(TASK)から関数コールされることを前提としています。
etSTS oAT24C08C_BYTE_WRITE( etCMP cmp, uint16 mem_adr, uint8 val )
oAT24C08C_BYTE_WRITE関数は、AT24C08Cに対して指定したアドレスmem_adrにvalの値をWriteするAPI関数です。この関数は、書き込み完了までの時間(iAT24C08C_WRITE_TIME [ms])が経過するまで、戻り値eSTS_EXEを返します。
備考 :
iAT24C08C_WRITE_TIME [ms]経過計測は、この関数をコールするThread周期から計算するので、THREAD_OSS_ECAL_PERIOD [ms]にThread周期を設定してください。
この関数を使用する際には、oAT24C08C_WP_DIS関数でライトプロテクトを解除してからご利用ください。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_EXE | 実行中 | ||
| eSTS_ERR_PARAMETER | パラメータエラー(メモリアドレス) | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| uint16 mem_adr | メモリアドレス | 0x0000 to 0x03ff | |
| uint8 val | 書き込むデータ |
etSTS oAT24C08C_PAGE_WRITE( etCMP cmp, uint16 mem_adr, uint16 len, uint8* buf )
oAT24C08C_PAGE_WRITE関数は、AT24C08Cに対して指定したアドレスmem_adrから順番にbuf[0]からbuf[len-1]の値をWriteするAPI関数です。この関数は、書き込み完了までの時間(iAT24C08C_WRITE_TIME [ms])が経過するまで、戻り値eSTS_EXEを返します。
備考 :
mem_adr + len > 0bXXXXXX1111となった場合、アドレスはA4~A8を固定としてA0~A3を0bXXXXXX0000にロールオーバします。
iAT24C08C_WRITE_TIME [ms]経過計測は、この関数をコールするThread周期から計算するので、THREAD_OSS_ECAL_PERIOD [ms]にThread周期を設定してください。
この関数を使用する際には、oAT24C08C_WP_DIS関数でライトプロテクトを解除してからご利用ください。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_EXE | 実行中 | ||
| eSTS_ERR_PARAMETER | パラメータエラー(メモリアドレス) | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| uint16 mem_adr | メモリアドレス | 0x0000 to 0x03ff | |
| uint16 len | 書き込むByte数 (Max 16) | ||
| uint8* buf | 書き込むデータバッファ |
etSTS oAT24C08C_CURRENT_READ( etCMP cmp, uint8* rlt )
oAT24C08C_CURRENT_READ関数は、AT24C08Cに対して前回のReadまたはWriteしたアドレス + 1から1Byte分の値をReadし、rltに保存するAPI関数です。
備考 :
前回のReadまたはWriteしたアドレス + 1 > 0b1111111111となった場合、アドレスは0b0000000000にロールオーバします。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| 引数 OUT | uint8* rlt | 読み込むデータ |
etSTS oAT24C08C_RANDOM_READ( etCMP cmp, uint16 mem_adr, uint8* rlt )
oAT24C08C_RANDOM_READ関数は、AT24C08Cに対して指定したアドレスmem_adrから1Byte分の値をReadし、rltに保存するAPI関数です。
備考 :
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_PARAMETER | パラメータエラー(メモリアドレス) | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| uint16 mem_adr | メモリアドレス | 0x0000 to 0x03ff | |
| 引数 OUT | uint8* rlt | 読み込むデータ |
etSTS oAT24C08C_SEQ_READ( etCMP cmp, uint16 mem_adr, uint16 len, uint8* buf )
oAT24C08C_SEQ_READ関数は、AT24C08Cに対して指定したアドレスmem_adrから順番にlen分のデータを読み込み、buf[0]からbuf[len-1]に保存するAPI関数です。
備考 :
mem_adr + len > 0b1111111111となった場合、アドレスは0b0000000000にロールオーバします。
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_PARAMETER | パラメータエラー(メモリアドレス) | ||
| eSTS_ERR_I2C_OBJECT | I2Cオブジェクト選択エラー | ||
| eSTS_ERR_OTHERS_RUN | 他のコンポーネントが処理実行中 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 他のアプリケーションがHAL実行中 | ||
| eSTS_ERR_HAL_I2C | HAL I2Cエラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード | |
| uint16 mem_adr | メモリアドレス | 0x0000 to 0x03ff | |
| uint16 len | 読み込むByte数 | ||
| 引数 OUT | uint8* buf | 読み込むデータバッファ |
etSTS oAT24C08C_WP_EN( etCMP cmp )
oAT24C08C_WP_EN関数は、AT24C08Cに対してWrite protect enable (write disable) = “Hi” 出力するAPI関数です。
備考 :
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_GPIO_OBJECT | GPIOオブジェクト選択エラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード |
etSTS oAT24C08C_WP_DIS( etCMP cmp )
oAT24C08C_WP_DIS関数は、AT24C08Cに対してWrite protect disable (write enable) = “Low” 出力するAPI関数です。
備考 :
| 戻り値 | etSTS | OSS-ECALステータスコード | |
| eSTS_FIN | 正常終了 | ||
| eSTS_ERR_GPIO_OBJECT | GPIOオブジェクト選択エラー | ||
| 引数 IN | etCMP cmp | OSS-ECAL コンポーネントコード |
HALサポート
OSS-ECALのHAL対応は、次の通りです。(順次拡大中)尚、同じHALであってもVerやMCU、開発環境が異なると動作が合わない場合がありますので、ご注意ください。
| メーカ | SDK/IDE ツール | HAL名称 | Ver | HALNAME | Support |
|---|---|---|---|---|---|
| Arduino | Arduino IDE | Arduino | 1.8.6 | ARDUINO | X |
| Arm | Keil MDK v6 | Mbed OS | 6.17.0 | MBED | X |
| Debian | – | GNU/Linux | 10.3 | Linux | X |
| Infineon | ModusToolbox | mtb-hal-cat1 | 2.4.3 | ModusToolbox | X |
| NXP | MCUXpresso SDK | SDK_2.x_EVKB-IMXRT1050 | 2.16 | iMXRT1051B1052B | X |
| Renesas | Synergy Software Package | HAL | 2.6.0 | SSP | – |
| STMicroelectronics | STM32Cube | STM32CubeF4 | V1.28.1 | STM32F4 | X |
開発環境
OSS-ECAL開発時のMCUおよび開発環境は、次の通りです。
| HALNAME | メーカ | 開発ボード | MCU | IDE |
|---|---|---|---|---|
| ARDUINO | Arduino | 1.Mega 2560 Rev3 2.Arduino Pro Mini 3.3V | ATmega2560 ATmega328P | Arduino IDE 2.3.3 |
| MBED | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | Arm Keil Studio Cloud |
| Linux | BeagleBoard | BeagleBone Black | TI AM335x | – |
| ModusToolbox | Infineon | CY8CPROTO-063-BLE PSoC 6 BLE Prototyping Kit | CYBLE-416045-02 | ModusToolbox |
| iMXRT1051B1052B | NXP | IMXRT1050-EVKB | i.MX RT1050 | MCUXpresso IDE |
| SSP | Renesas | S7G2 SK | R7FS7G27H3A01CFC | e² studio for Renesas Synergy |
| STM32F4 | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | STM32CubeIDE |
File構成
| フォルダ* | ファイル | 概要 |
|---|---|---|
| AT24C08C_HALNAME_VERSION/sample | sample.c (.cpp) | サンプル・アプリケーション・プログラム |
| sample.h | サンプル・アプリケーション・ヘッダ | |
| AT24C08C_HALNAME_VERSION | oAT24C08C.c (.cpp) | AT24C08C用OSS-ECALプログラム |
| oAT24C08C.h | AT24C08C用OSS-ECALヘッダ | |
| oss_ecal.h | OSS-ECAL 共通ヘッダ | |
| AT24C08C_ARDUINO.ino | Arduino用サンプル・アプリケーション・プログラム | |
| user_setting.c (.cpp) | ユーザ設定定数・テーブル | |
| user_setting.h | ユーザ設定ヘッダ | |
| oHAL_i2c_stm32f4.c | STM32Cube FW_F4用HALプログラム | |
| oHAL_i2c_stm32f4.h | STM32Cube FW_F4用HALヘッダ | |
| readme.md | Readme | |
| OSS-ECAL Terms of Use.txt | OSS-ECAL利用条件 |
* HALNAMEは、HALサポートを参照してください。
OSS-ECAL ダウンロード
OSS-ECALのダウンロードは、英語版OSS-ECALサイトからお願いいたします。なお、ダウンロードを行う際は、英語版OSS-ECALサイトにログインしてから操作してください。
組込み方法
下記を参考にユーザプログラムにAPI関数を組み込んでください。
Pin A2の設定は、user_setting.hの以下のコードで設定してください。
// Device address Code bit2:A2
#define AT24C08C_1 0b00000000Infineon ModusToolbox HALの場合は、I2C Timeoutの設定をuser_setting.hの以下のコードで設定してください。
詳しくは、cyhal_i2c_master_write(), cyhal_i2c_master_read() Parameters timeoutを参照してください。
#define I2C_TIMEOUT 10U // Timeout[ms] STM32Cube FW_F4 HALの場合、I2C Timeout時間は25msです。
注意:
次のコマンドAPI関数は、Read/Writeのデータ長 len によって、Timeoutの時間が異なります。
etSTS oAT24C08C_PAGE_WRITE( etCMP cmp, uint16 mem_adr, uint16 len, uint8* buf )
etSTS oAT24C08C_SEQ_READ( etCMP cmp, uint16 mem_adr, uint16 len, uint8* buf )
ユーザプログラムに複数のOSS-ECAL(同じMCU機能の電子部品)を組み込む方法
ユーザプログラムに複数のOSS-ECAL(異なるMCU機能の電子部品)を組み込む方法
注意事項
サンプル版OSS-ECALは、優先順位の異なるThread(Task)や割込みで用いることを前提としていません。下記の例のような使い方はしないでください。
例)同じADCグループに各センサーが割り当てられ、優先順位が異なる処理でOSS-ECAL APIを実行すると、正しい値を取得できない場合があります。
ADC Gr0 Ch0 温度センサ AD22100A 100ms周期 Thread(優先順位低)で温度取込み
ADC Gr0 Ch1 圧力センサ MPX5999D イベント割込み(優先順位高)で圧力取込み