この投稿では、制御モデルで見落とされやすいポイントについて説明します。
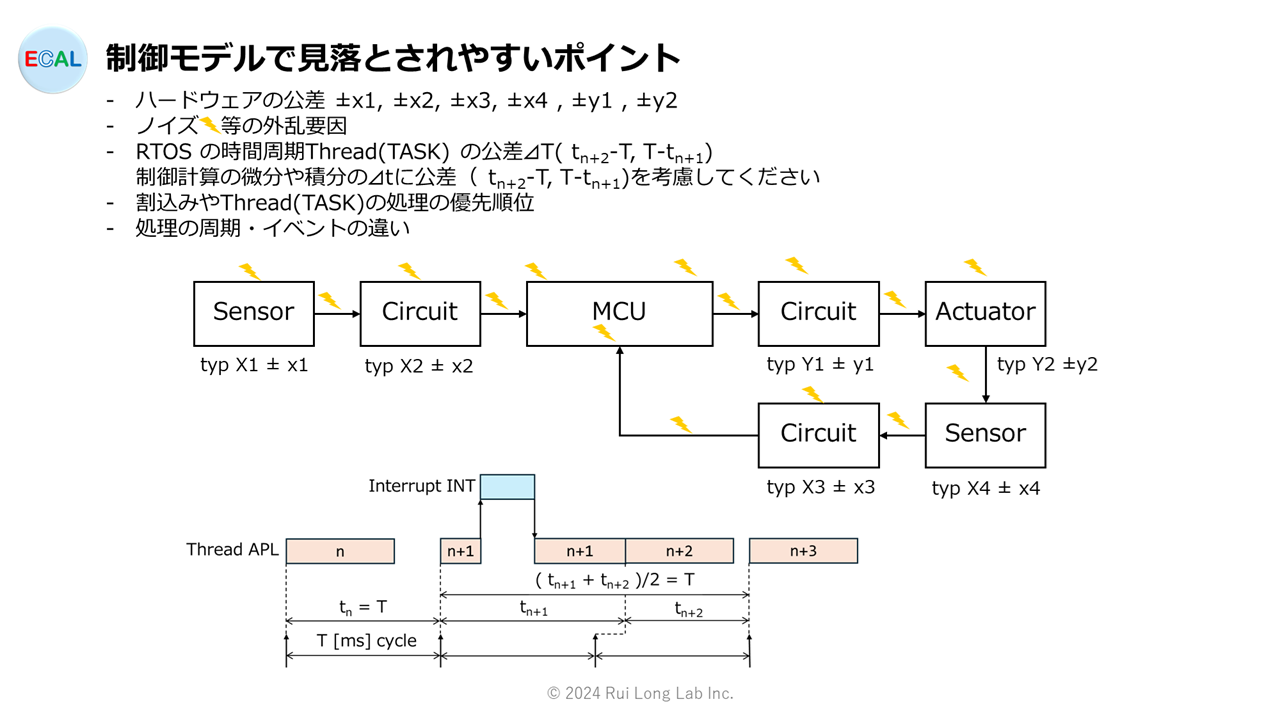
制御モデルは、以下のポイントが見落とされやすいです。Typical値だけでシミュレーションしていると実装した時に乖離が発生しますので、公差やノイズ等の影響を受けた時を想定してシミュレーションしておくと実装からのフィードバックが少なくてすみます。また、RTOSを用いた制御システムでは、処理周期の公差や処理優先順位、処理の周期・イベントの違いも考慮してください。
- ハードウェアの公差 ±x1, ±x2, ±x3, ±x4 , ±y1 , ±y2
- ノイズ等の外乱要因
- RTOS の時間周期Thread(TASK) の公差⊿T( tn+2-T, T-tn+1)
制御計算の微分や積分の⊿tに公差( tn+2-T, T-tn+1)を考慮してください - 割込みやThread(TASK)の処理の優先順位
- 処理の周期・イベントの違い