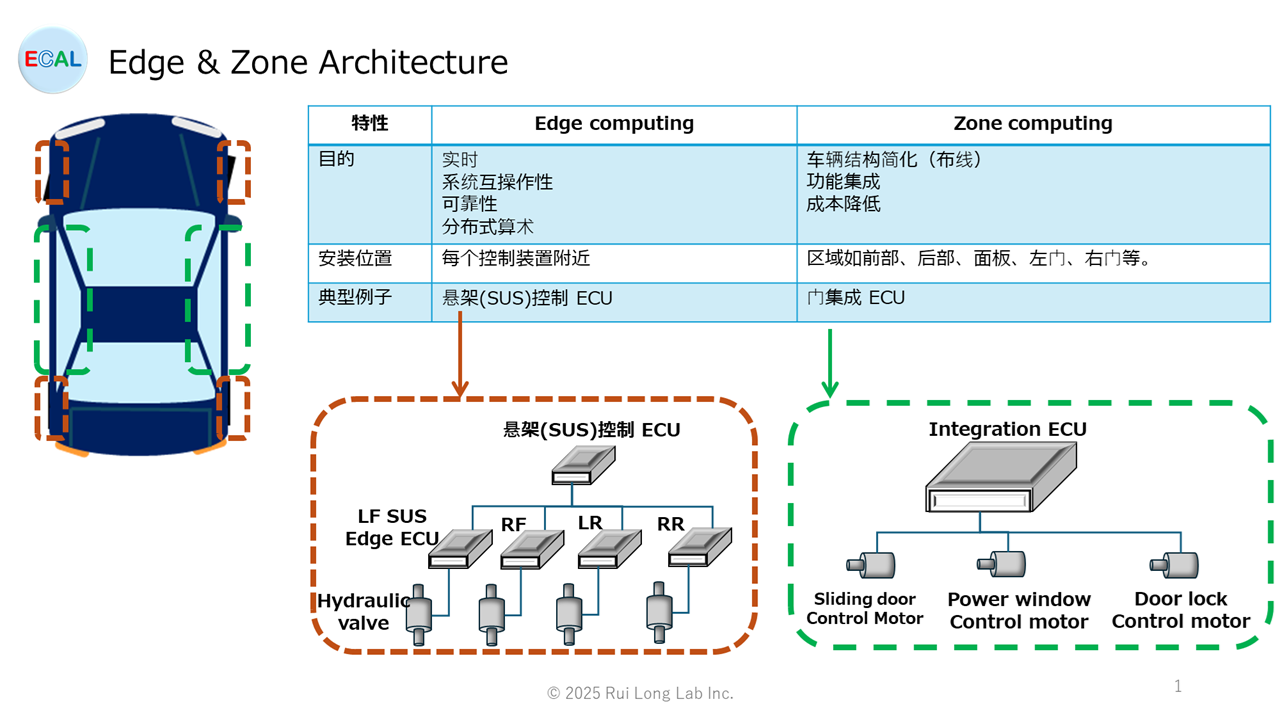
随着软件定义车辆(SDV)的近期发展,这一热门话题正推动着电子控制单元(ECU)架构从域架构向边缘架构、区域架构以及边缘与区域相结合的架构转变。OSS-ECAL 是一款适用于将传感器、执行器、外部存储器及其他与架构变更相关的组件进行移植的开源软件(OSS)。
OSS-ECAL 是一款专有 OSS,与 AUTOSAR 毫无关联。
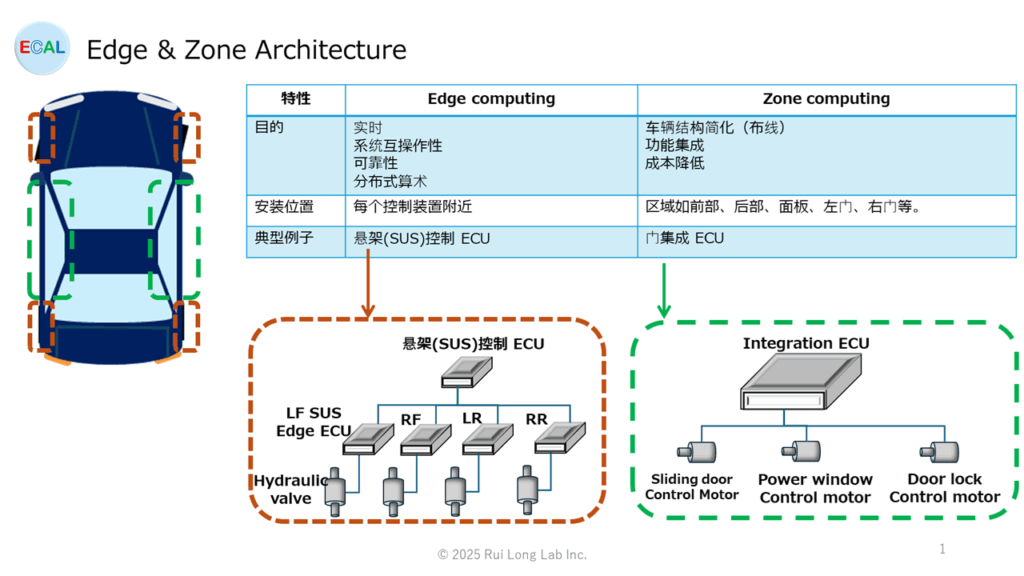
OSS-ECAL 符合电子元件的通用要求
随着向采用 SDV 的 Edge & Zone 架构过渡,我们有望通过统一所有车型中各 ECU 使用的传感器、执行器和外部存储器,从而通过集中采购降低成本。
然而,如果各一级制造商各自开发传感器、执行器和外部存储器的软件,则会浪费时间和成本。因此,通过使用 OSS-ECAL,可以缩短软件开发时间,降低开发成本,并通过共用来提高质量。
SDV
关于 SDV(软件定义汽车),不仅存在与 ECU 重写相关的问题,还涉及车辆 API、自动驾驶、ECU 架构、安全、数据中心、AI、用于 AI 的 CPU(GPU、NPU、SoC)以及高速内存等问题。在这篇文章中,我还整理了之前关于 SDV 的文章。请注意,由于我并非 SDV 专家,因此可能与实际的 SDV 存在一些差异。
SDV 开发阶段
我认为 SDV 的开发阶段将划分如下。至于车辆 API,我对此一无所知,因此这里没有提及。
| 开发阶段 | 主要特点 | 概括 | 发展 |
|---|---|---|---|
| Phase 1 配备OTA功能 | Over The Air(OTA) | – ECU复制功能 – 重新编程安全 | 1-1 OTA 1-2 信息安全 标准规格 独自規格 1-3 下一代车载设备及ECU架构定义 1-4 MBD敏捷开发环境 |
| Phase 2 增强型车载信息系统功能 | User’s Application | – 用户应用程序 SNS GAME VOD Payment 生成式AI 礼宾人工智能 用户个人信息安全 | 2-1 用户个人信息安全使用记录及信息隐藏 |
| Phase 3 自动驾驶及拼车服务 | 自动驾驶 | – 共享乘车服务 – Payment – 自动驾驶 – 自动泊车 | 3-1 Vehicle API 3-2 自动驾驶AI 3-3 图像识别AI 3-4 车载AI CPU, GPU, NPU, SoC 3-5 车载AI内存 |
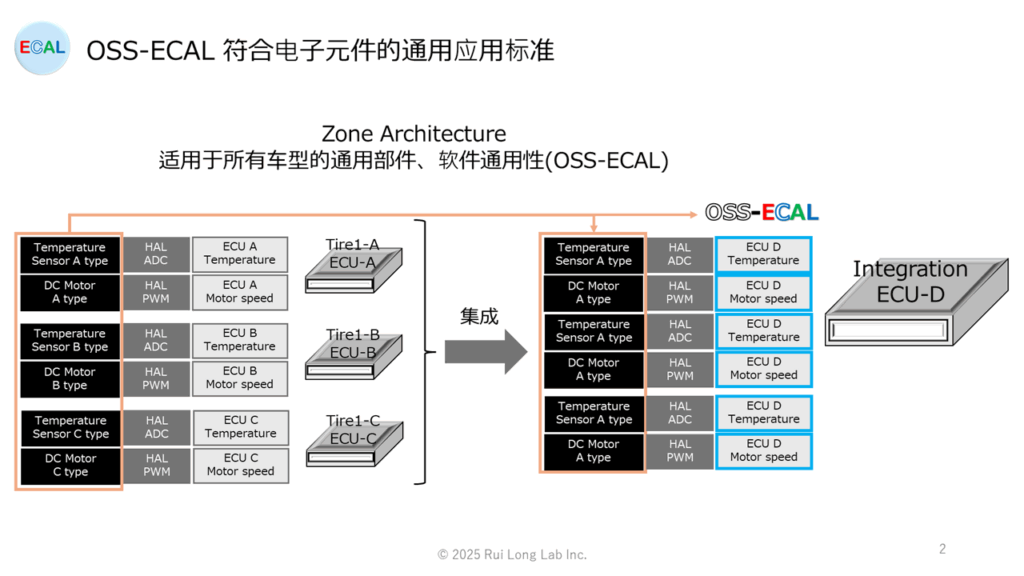
SDV网络
第 3 阶段的 SDV 网络配置如下。
通信协议
| SDV Servers | Telematics | VOC | 5G/6G, Wifi |
| Smartphone, Tablet PC | Telematics | VOC | Bluetooth, USB |
| Telematics | Integrated ECU, ECU’s | VIC | Ethernet, FlexRAY, CAN |
| Integrated ECU | ECU | VIC | Ethernet, FlexRAY, CAN |
| Integrated ECU | Image AI(ADAS) | VIC | Ethernet |
| ECU | ECU | VIC | FlexRAY, CAN |
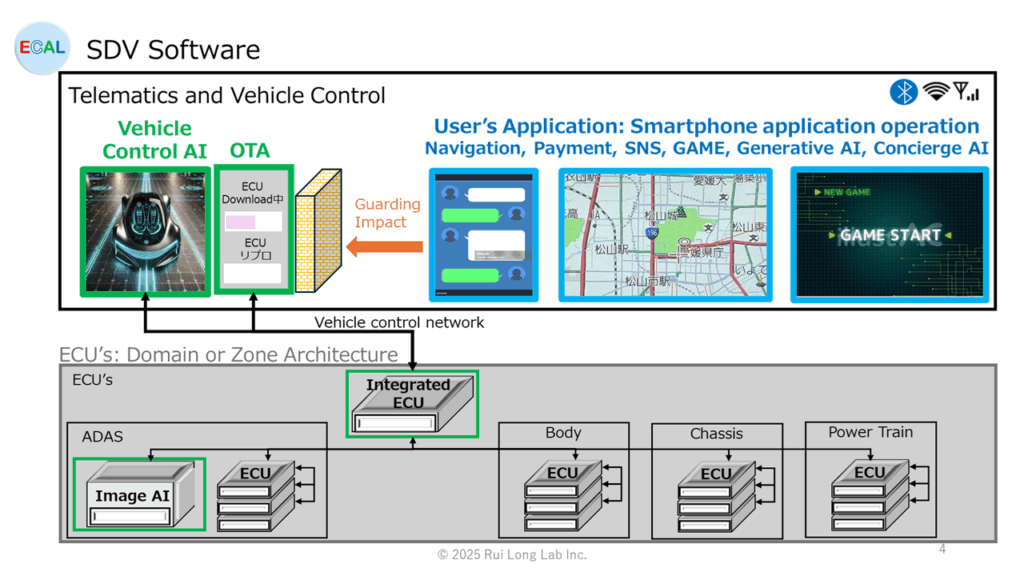
SDV 软件
第三阶段受SDV影响的车载软件如下。
这里最重要的是必须确保功能安全。如果这些软件出现故障,可能会引发严重事故。例如,智能手机的应用程序在设计时也确保了单个故障不会影响通话功能。
- 车载信息系统的用户应用程序必须与车辆控制系统或电子控制单元(ECU)系统的应用软件分离,以避免相互影响。
- 即使可以通过OTA进行更新,也不应在未充分验证车辆控制系统或ECU系统软件的质量的情况下就发布软件。
| SDV 软件 | 车载设备: 软件 | 软件开发与提供方 | OS |
|---|---|---|---|
| OTA(包括信息安全) | Telematics: OTA | OEM, Tire1 | Linux, AAOS**, iOS |
| Integrated ECU | OEM, Tire1 | Linux, RTOS | |
| ECU | OEM, Tire1 | 各ECU RTOS | |
| ADAS ECU | OEM, Tire1 | RTOS, SoC | |
| User’s Application | Telematics: User’s Application | 应用程序提供商 | AAOS**, iOS |
| Telematics: User’s Application(个人隐私安全) | OEM, Tire1 | AAOS**, iOS | |
| AI Learning Information (包括信息安全) | Telematics: Vehicle Control AI* | OEM, Tire1, AI Service | Linux, SoC |
| Integrated ECU | OEM, Tire1 | Linux, RTOS | |
| Image AI* | OEM, Tire1, AI Service | Linux, SoC | |
| Traffic Information and Automated service(包括信息安全) | Telematics: Navigation | Navi Service, Automated Service | AAOS**, iOS |
| VICS中心 | AAOS**, iOS | ||
| Telematics: Vehicle Control AI* | OEM, Tire1, AI Service | Linux, SoC |
* 车载人工智能系统需要高性能的处理器(如CPU、GPU、NPU、SoC)以及高速内存,而OEM厂商、一级供应商(Tier1)和二级供应商(Tier2)正在积极进行相关开发工作。
** AAOS: Android Automotive OS
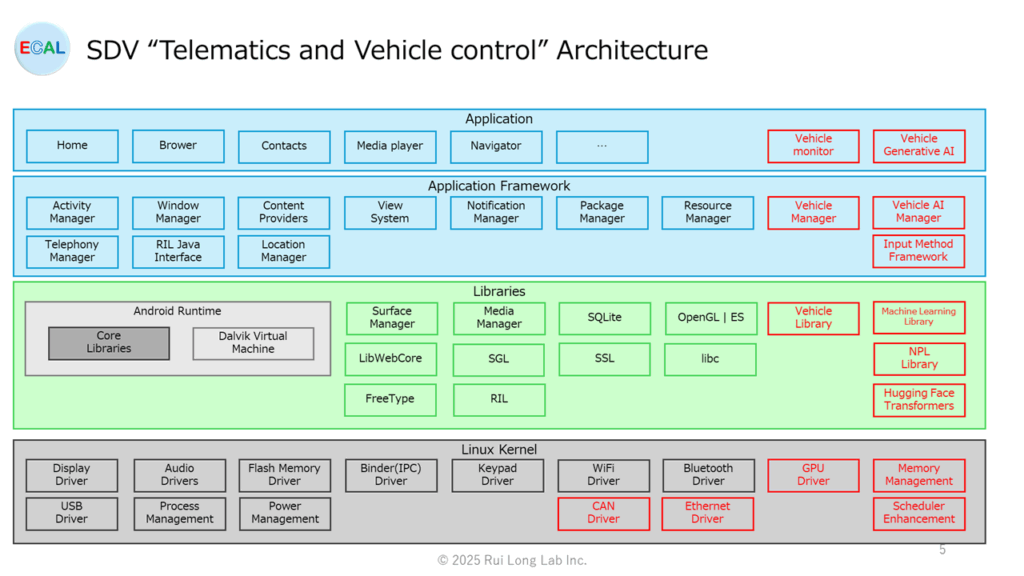
“Telematics and Vehicle control”アーキテクチャ
我参考AAOS搭建了“车联网与车辆控制”的架构。红框部分是我自己画的图,因为超出了我的专业范围,我之前研究得还不够。
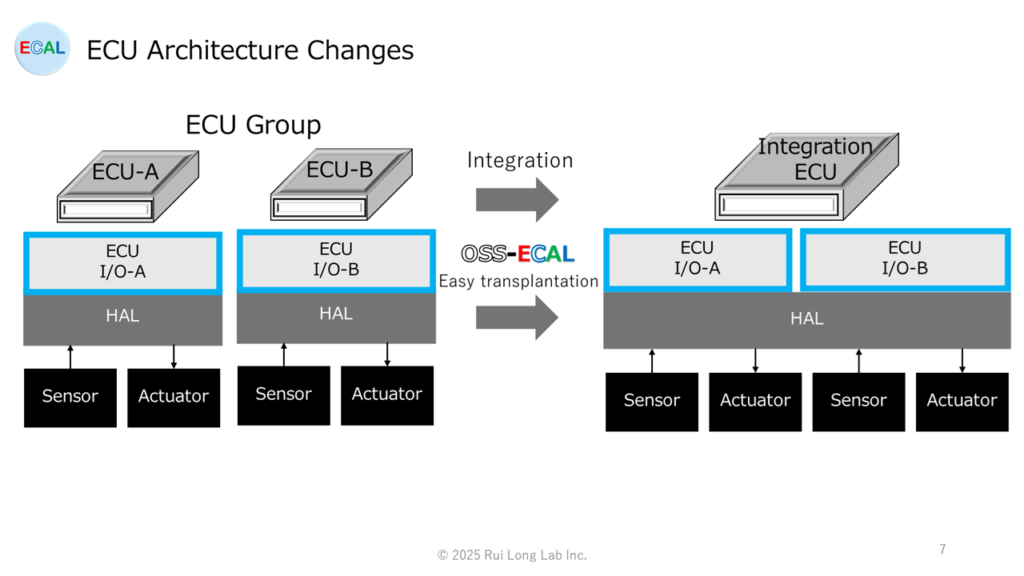
OSS-ECAL 适应 SDV 时代
SDV 将导致 ECU 架构发生诸多变化。OSS-ECAL 是一种 OSS,可为传感器、执行器和外部存储器的软件组件提供高度可移植性。
ECU
关于ECU(电子控制单元)的域架构,我们已将其总结如下表所示。未来,我们认为ECU将根据各系统的特性,向边缘架构、区域架构或边缘&区域架构转变。
| 系统 | 缩写 | 角色 |
|---|---|---|
| 动力传动系统 | ECU (Engine Control Unit) | 发动机的燃油喷射、点火、怠速等控制 |
| ICU (Inverter Control Uint) | 电动汽车/混合动力汽车的电机驱动(逆变器/转换器)控制 | |
| TCU (Transmission Control Unit) | AT/CVT/DCT变速器的控制 | |
| BMS (Battery Management System) | 电动汽车/混合动力汽车电池电量和温度管理 | |
| EMS (Energy Management System) | 整车能源优化控制 | |
| 底盘系统 | VCU (Vehicle Control Unit) | 综合控制驾驶模式和车辆行为 |
| EPS (Electric Power Steering System) | 方向盘转向角控制 | |
| ESC (Electronic Stability Control) | 制动控制,防止打滑和翻车 | |
| ABS (Anti-lock Braking System) | 制动控制,防止轮胎抱死 | |
| ECS (Electronic Controlled Suspension) | 控制悬挂刚度 | |
| AWD (All-Wheel Drive) | 控制四轮驱动车辆的驱动力分配。 | |
| 车身系统 | BCM (Body Control Module) | 控制灯光、电动车窗、门锁等。 |
| KOS (Keyless Operation System) | 无钥匙进入控制、发动机启动控制 | |
| HVAC (Heating, Ventilation, and Air Conditioning) | 控制空调和加热器的温度和风量调节 | |
| LCU (Lamp Control Unit) | 控制前大灯、尾灯和指示灯 | |
| SCU (Seat Control Unit) | 电动座椅定位和加热控制 | |
| RCU (Roof Control Unit) | 控制天窗和敞篷车顶的开启和关闭 | |
| ADAS系统 | ADAS (Advanced Driver Assistance System) | 综合控制防撞、车道保持、ACC 等功能 |
| LKA (Lane Keep Assist) | 车道偏离预防和转向修正控制 | |
| AEB (Autonomous Emergency Braking) | 用于避免碰撞的自动制动控制系统 | |
| ACC (Adaptive Cruise Control) | 控制与前方车辆保持距离 | |
| APA (Automatic Parking Assist) | 自动泊车辅助控制系统 | |
| AVM (Around View Monitor) | 合成多个摄像头图像,显示车辆周围环境 |
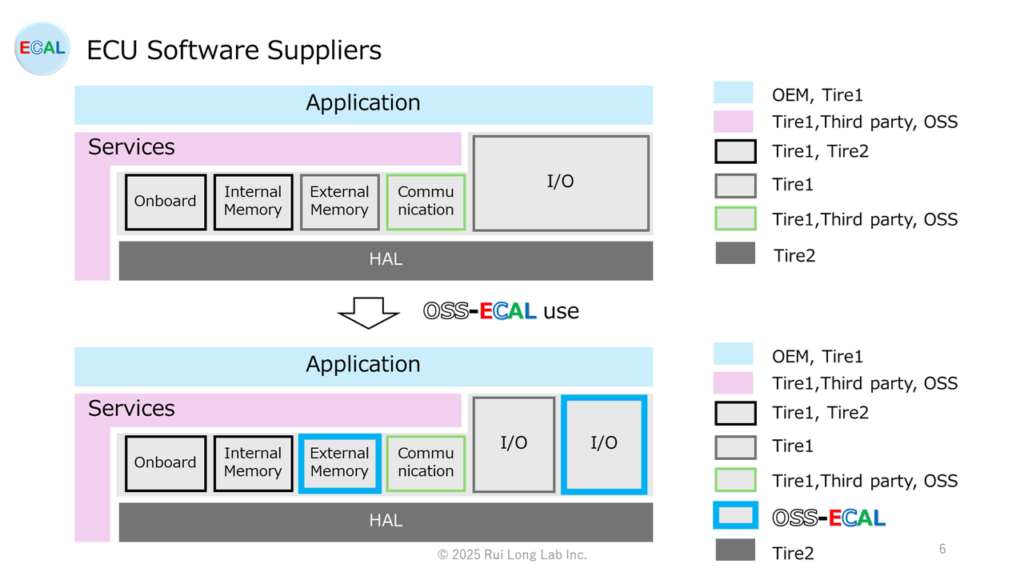
领域架构 ECU 软件供应商
在域架构中,ECU软件的供应商结构大致如下图所示。Tire1提供的I/O和外部EEPROM通过采用OSS-ECAL技术,可实现效率提升。
移动传感器和执行器
基本上,传感器、执行器和外部存储器等组件,无论是在域架构、边缘架构、区域架构还是边缘与区域混合架构中,其配置的ECU仅会发生变化。因此,传感器、执行器和外部存储器的软件组件必须具备高度的可移植性。OSS-ECAL 是一款注重可移植性的开源软件。
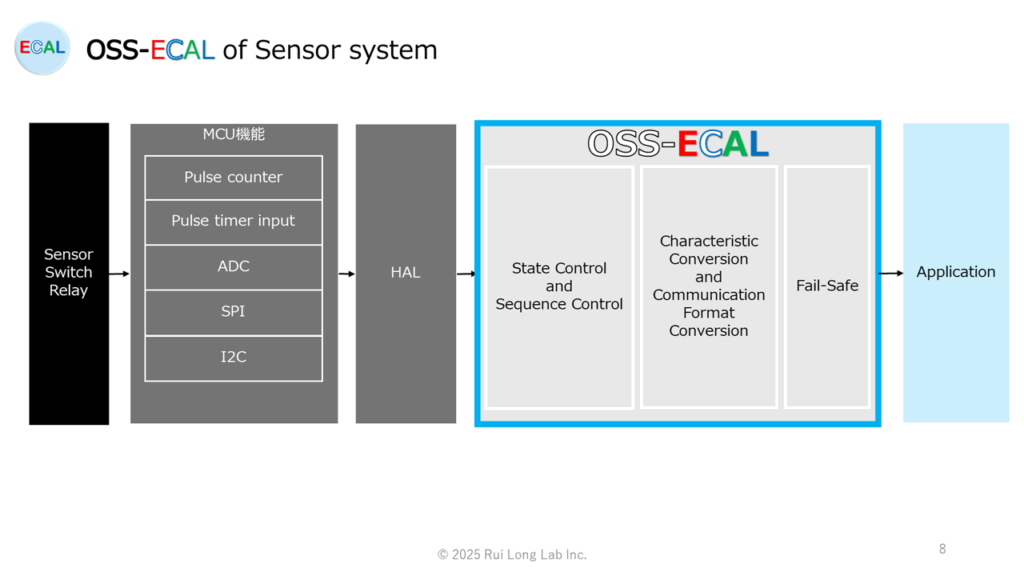
传感器系统 OSS-ECAL
传感器系统OSS-ECAL是一款具备传感器功能状态转换、序列控制、通信格式转换、物理值转换、HAL接口、故障安全功能、传感器标准API等功能的软件组件。通过这些功能,该系统实现了高度的可移植性和可维护性,并通过在各种产品中的通用应用确保了系统的可靠性。
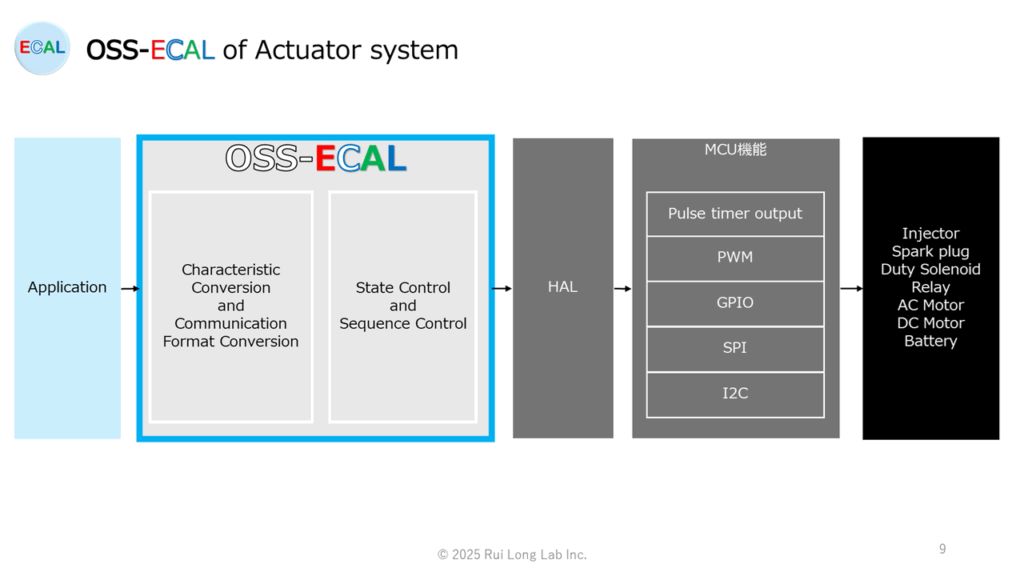
执行器系统 OSS-ECAL
OSS-ECAL 执行器系统是一个软件组件,具备执行器功能的状态转换、序列控制、通信格式转换、物理值转换、HAL 接口、故障安全功能以及执行器标准 API 等功能。通过这些功能,该系统实现了高移植性和可维护性,并通过在各种产品中的通用应用确保了可靠性。
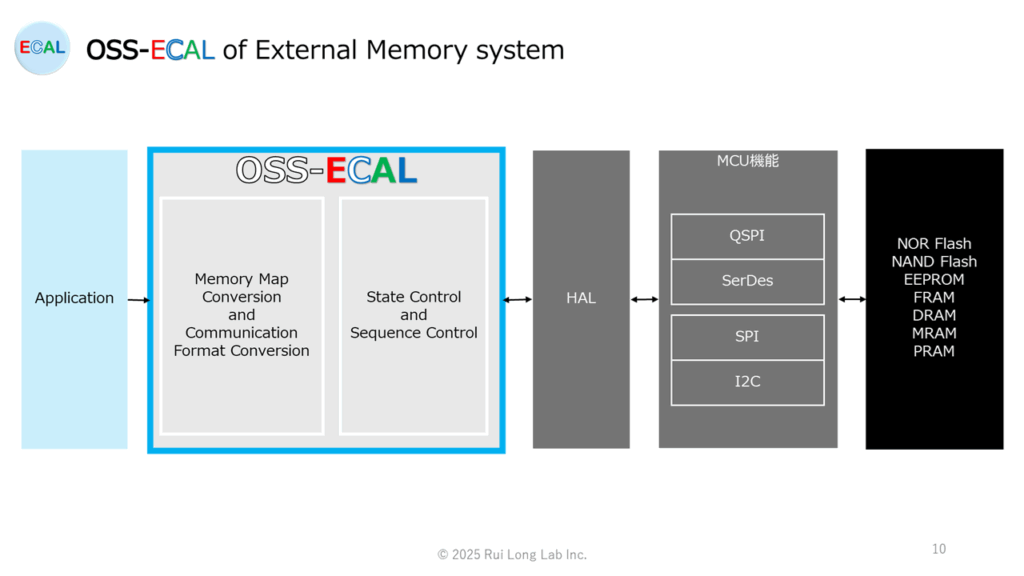
外部存储器系统 OSS-ECAL
外部存储器系统OSS-ECAL是一款软件组件,具备外部存储器功能的状态转换、序列控制、通信格式转换、HAL接口、故障安全功能以及外部存储器标准API等功能。通过这些功能,该组件实现了高度的可移植性和可维护性,并通过在各种产品中的通用应用确保了可靠性。
电子元件的标准API化
OSS-ECAL的API会考虑部件型号。然而,可以通过#define来标准化API。
例如:温度传感器ABC1的应用程序注册
/* Temperature ABC1 read function*/
etSTS oABC1_READ( float32* );
#define TEMPERATURE_READ oABC1_READ
etSTS TEMPERATURE_READ( float32* rlt )将温度传感器ABC1更换为温度传感器ABC2时,应用程序需要修改的部位。此外,请将OSS-ECAL文件替换为ABC2的文件。
/* Temperature ABC2 read function*/
etSTS oABC2_READ( float32* );
#define TEMPERATURE_READ oABC2_READ
etSTS TEMPERATURE_READ( float32* rlt )未来汽车用OSS-ECAL
未来,车载兼容OSS-ECAL将通过以下举措,为汽车行业的发展贡献力量。
- 车载电子元件的扩充
- 各MCU SDK工具的OSS-ECAL插件开发
- Eclipse SDV等SDV工具的OSS-ECAL插件开发
- OSS-ECAL的Slimulink模型开发
建议 OEM 和 Tire 1 咨询其电子元件制造商或电子元件贸易公司,以获取所需的 OSS-ECAL。