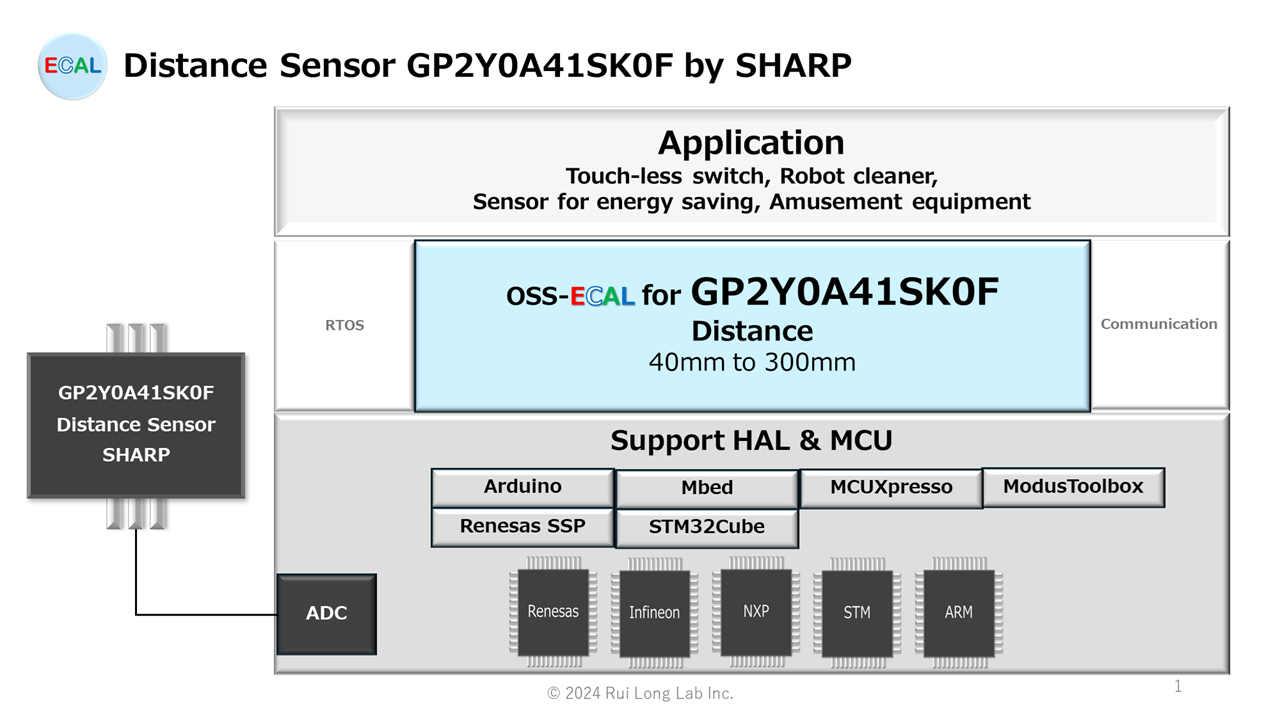
GP2Y0A41SK0F 的概述以及GP2Y0A41SK0F 用OSS-ECAL的提供情况。GP2Y0A41SK0F是 Sharp 公司生产的距离测量传感器 IC(40.0 至 300.0mm)。
MCU interface : ADC
注意: 本资源的原始语言为英语。 翻译仅为方便起见提供概要,可能使用了机器翻译,我们对翻译的准确性和合理性不作任何保证。 此外,在进行实际设计等操作前,请务必参考最新版本的Datasheet。
GP2Y0A41SK0F
概述
GP2Y0A41SK0F 是一款集成了 PSD(位置感应型检测器)、IR-LED(红外发光二极管)和信号处理电路的测距传感器单元。该传感器采用三角测量方式,因此不受目标物反射率差异、环境温度、工作时间等因素的影响,能够实现距离检测。它根据检测距离输出相应的电压,因此也可作为接近传感器使用。
特点
- 测距传感器由光电二极管阵列(PSD)、红外线LED和信号处理电路组成。
- 短测量周期(16.5 ms)
- 测距范围: 40.0 至 300.0 mm
- 紧凑型尺寸(29.5×13.0×13.5mm)
- 模拟输出类型
用途
- 非接触式传感器开关
- 清洁机器人
- 节能传感器
- 娱乐
OSS-ECAL规格
API 函数
OSS-ECAL API 函数基本上被假定为周期性Thread (TASK) 的函数调用。
etSTS oGP2Y0A41SK0F_START(void)
oGP2Y0A41SK0F_START 函数是用于启动 GP2Y0A41SK0F 的 AD 转换的 API 函数。
| 返回值 | etSTS | OSS-ECAL status code | |
| eSTS_FIN | 成功完成 | ||
| eSTS_ERR_HAL_ADC | HAL ADC 错误 | ||
| eSTS_ERR_OTHERS_RUN | 其他组件正在执行程序 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 其他应用程序正在运行 HAL (STM32F4) | ||
| eSTS_ERR_ADC_OBJECT | ADC 对象选择错误 |
etSTS oGP2Y0A41SK0F_READ( float32* rlt )
oGP2Y0A41SK0F_READ函数用于确认 GP2Y0A41SK0F 的AD转换是否完成,读取AD转换值,将该AD转换值转换为距离,并将该距离保存到rlt中的API函数。
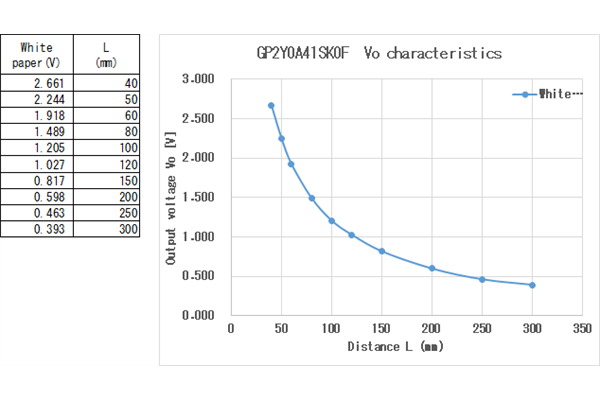
AD转换值到距离转换公式
Voltage value = (AD conversion value × VDD) / ( 2AD bit )
Distance = table search value below (Min, Max Limit)
| 返回值 | etSTS | OSS-ECAL status code | |
| eSTS_FIN | 成功完成 | ||
| eSTS_ERR_MIN | 最低距离error(rlt为最低距离) | ||
| eSTS_ERR_MAX | 最高距离error(rlt为最高距离) | ||
| eSTS_ERR_HAL_ADC | HAL ADC 错误 (STM32F4 Timeout) | ||
| eSTS_ERR_OTHERS_RUN | 其他组件正在执行程序 | ||
| eSTS_ERR_ADC_OBJECT | ADC 对象选择错误 | ||
| 参数 OUT | float32* rlt | 距离 40.0 至 300.0 [mm] |
etSTS oGP2Y0A41SK0F_START_READ( float32* rlt )
oGP2Y0A41SK0F_START_READ 函数是一个 API 函数,用于启动 GP2Y0A41SK0F 的 AD 转换,等待 AD 转换完成,读取 AD 转换值,将 AD 转换值转换为距离特性,并将距离存储在 rlt 中。
AD转换值到距离转换公式
Voltage value = (AD conversion value × VDD) / ( 2AD bit )
Distance = table search value below (Min, Max Limit)
| 返回值 | etSTS | OSS-ECAL status code | |
| eSTS_FIN | 成功完成 | ||
| eSTS_ERR_MIN | 最低距离error(rlt为最低距离) | ||
| eSTS_ERR_MAX | 最高距离error(rlt为最高距离) | ||
| eSTS_ERR_HAL_ADC | HAL ADC 错误 (STM32F4 Timeout) | ||
| eSTS_ERR_OTHERS_RUN | 其他组件正在执行程序 | ||
| eSTS_ERR_HAL_OTHERS_RUN | 其他应用程序正在运行 HAL (STM32F4) | ||
| eSTS_ERR_ADC_OBJECT | ADC 对象选择错误 | ||
| 参数 OUT | float32* rlt | 距离 40.0 至 300.0 [mm] |
电压/距离转换表
HAL 支持列表
OSS-ECAL 的 HAL 支持如下。 请注意,即使使用相同的 HAL,不同的版本、MCU 和开发环境也可能无法协同工作。 该列表正在按顺序扩展。
| Manufacturer | SDK/IDE Tool | HAL Name | Ver | HALNAME | Support |
|---|---|---|---|---|---|
| Arduino | Arduino IDE | Arduino | 1.8.6 | ARDUINO | X |
| Arm | Keil MDK v6 | Mbed OS | 6.17.0 | MBED | X |
| Debian | – | GNU/Linux | 10.3 | Linux | – |
| Infineon | ModusToolbox | mtb-hal-cat1 | 2.4.3 | ModusToolbox | X |
| NXP | MCUXpresso SDK | SDK_2.x_EVKB-IMXRT1050 | 2.16 | iMXRT1051B1052B | X |
| Renesas | Synergy Software Package | HAL | 2.6.0 | SSP | X |
| STMicroelectronics | STM32Cube | STM32CubeF4 | V1.28.1 | STM32F4 | X |
HAL 功能对应表
| HALNAME | oGP2Y0A41SK0F_START | oGP2Y0A41SK0F_READ | oGP2Y0A41SK0F_START_READ |
|---|---|---|---|
| ARDUINO | – | – | X |
| MBED | – | – | X |
| Linux | – | – | – |
| ModusToolbox | – | – | X |
| iMXRT1051B1052B | X | X | X |
| SSP | X | X | X |
| STM32F4 | X | X Time-out time: HAL_MAX_DELAY | X Time-out time: HAL_MAX_DELAY |
开发环境
OSS-ECAL 开发过程中的 MCU 和开发环境如下。
| HALNAME | Manufacturer | Board | MCU | IDE |
|---|---|---|---|---|
| ARDUINO | Arduino | 1.Mega 2560 Rev3 2.Arduino Pro Mini 3.3V | ATmega2560 ATmega328P | Arduino IDE 2.3.3 |
| MBED | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | Arm Keil Studio Cloud |
| Linux | BeagleBoard | BeagleBone Black | TI AM335x | – |
| ModusToolbox | Infineon | CY8CPROTO-063-BLE PSoC 6 BLE Prototyping Kit | CYBLE-416045-02 | ModusToolbox |
| iMXRT1051B1052B | NXP | IMXRT1050-EVKB | i.MX RT1050 | MCUXpresso IDE |
| SSP | Renesas | S7G2 SK | R7FS7G27H3A01CFC | e² studio for Renesas Synergy |
| STM32F4 | STMicroelectronics | STM32 Nucleo-64 boards | STM32F401RETx | STM32CubeIDE |
文件结构
| Folder* | File | Summary |
|---|---|---|
| GP2Y0A41SK0F_HALNAME_010000/sample | sample.c (.cpp) | Sample application program |
| sample.h | Sample application header | |
| GP2Y0A41SK0F_HALNAME_010000 | oGP2Y0A41SK0F.c (.cpp) | OSS-ECAL program for GP2Y0A41SK0F |
| oGP2Y0A41SK0F.h | OSS-ECAL header for GP2Y0A41SK0F | |
| oss_ecal.h | OSS-ECAL common header | |
| GP2Y0A41SK0F_ARDUINO.ino | Sample application programs for Arduino | |
| user_setting.c (.cpp) | User configured constants and tables | |
| user_setting.h | User configuration Header | |
| readme.md | Readme | |
| OSS-ECAL Terms of Use.txt | OSS-ECAL Terms of Use |
* 有关 HALNAME,请参阅 HAL 支持。
OSS-ECAL 下载
请从 OSS-ECAL 英文网站下载 OSS-ECAL。下载时,请先登录 OSS-ECAL 英文网站,然后再进行操作。
内置方法
如何在用户程序中整合多个 OSS-ECAL(相同的 MCU 功能)
如何在用户程序中整合多个 OSS-ECAL(不同 MCU 功能)
注意
OSS-ECAL 示例版本不适用于线程(任务)或不同优先级的中断。 请不要像下面的示例那样使用它。
例如 如果每个传感器被分配到相同的 ADC 组,而 OSS-ECAL API 在具有不同优先级的进程中执行,则可能无法获得正确的值。
ADC Gr0 Ch0 Temperature sensor AD22100A 每隔 100 毫秒采集一次温度(低优先级)
ADC Gr0 Ch1 Pressure sensor MPX5999D 事件中断时采集压力(高优先级)